трехмерном пространстве любая тройка некомпланарных (не лежащих или не параллельных одной плоскости) векторов линейно независима, а любая четверка векторов линейно зависима.
Любой набор из максимального числа линейно независимых векторов некоторого линейного векторного R пространства называют его базисом. Наибольшее число линейно независимых векторов некоторого линейного векторного R пространства называют его размерностью. Приняты обозначения: R2 - пространство двумерных векторов на плоскости; R3 - пространство трехмерных векторов в пространстве.
ПРОЕКЦИЯ ВЕКТОРА НА ОСЬ
Осью называют любую прямую в пространстве или на плоскости с заданным на ней направлением (обычно ее направление задается единичным вектором, называемым ортом оси).
Углом между двумя векторами (отличными от 0) называется наименьший угол между двумя лучами,проведенные из одной точки пространства в направлениях этих векторов.
Углом между вектором а и осью L .называют угол, отсчитываемый против часовой стрелки от положительного направления оси к вектору.
Проекцией вектора на ось L называется длина отрезка А’В’ между основаниями перпендикуляров,опущенных из точек А и В на ось L Скалярной (чисовой) проекция вектора, на ось L равна произведению модуля вектора на косинус угла, образованного вектором с осью прLАВ = |АВ|cos(L^AB). Принято обозначение прLAB.
Если числовую проекцию умножит на единичный вектор (орт) оси, то получим вектрную проекцию или составляющую вектора вдоль оси.
Операция проектирования - линейная операция, т.е. сохраняет линейные операции: прС (а+b)=прС а+прСb, прС (ka)=kпрС а
Проекция линейной комбинации векторов равна линейной комбинации их проекций; прL(l1а1+l2а2) = l1прLа1 + l2прLа2.
Базисом называется линейно независимая система векторов,такая, при которой любой вектор,принадлежащий этому пространству,может быть выражен в виде линейной комбинации векторов этой системы.
Теорема единственности: Если задан базис е1 ,е2 ,е3 ,то разложение любого вектора а по этому базису единственно: а= а1е1 + а2е2 + а3е3 Если дан базис е1, е2, е3,то коэффициенты разложения вектора по этому базису называются координатами а = ( а1, а2, а3)
Замечание: У одного и того же вектора в разных базисах разные координаты.
Разложить по базису a, b вектор с, лежащий в плоскости базисных векторов значит представить его в виде c=xa + yb, где x, y - координаты вектора c в базисе a, b, аналогично для пространственного базиса.
При решении задач координатным методом или с помощью векторов - главным является удачный выбор системы координат - желательно чтобы система координат естественным образом определялась условиями задачи
|
|
Система координатэтоначало координат О и направляющие векторы осей, длины которых определяют масштаб на осях. Для перпендикулярных и единичных по длине направляющих векторов принято обозначение i, j, k. На плоскости направляющие векторы осей (базис) - любая пара неколлинеарных (непараллельных) векторов, в пространстве базис - любая тройка некомпланарных (непараллельных одной плоскости) векторов.
|
|
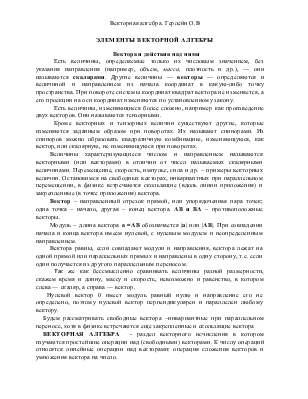
Коэффициенты этого разложения - координаты вектора в данной системе координат - проекции вектора на координатные оси, что можно записaть в виде a={ах, аy, аz} = ахi+ аyj+ аzk.
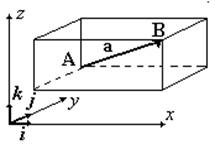
Направляющие косинусы вектора - косинусы углов a = (i^а), b = (j^а), g = (k^а), которые вектор cоставляет с осями OХ, OY, OZ. (cosa = aх/|a|, cosb = ay/|а|, cosg = az/|a|, тогда ах= прoхa = |a|cosa, аy=прoya = |a|cosb , аz=прoza =|a|cosg,
|
cos2a+ cos2b+ cos2g =1 |
Если возвести последние три равенства в квадрат и сложить, то получим основное тригонометрическое тождество для направляющих косинусов вектора:
Пусть в декартовой системе кooрдинат в пространстве заданы две точки или два их радиуса вектора rA = ОА ={хA, yA, zA}, r B = OB ={хB, yB, zB}. Из векторного равенства АВ=rВ - rА = {хВ-хА, yВ-yА, zВ-zА}, т. е. для нахождения координат вектора при известных координатах его начала и конца следует из координат координат конца вычесть координаты начала соответственно
a = {xВ - xА; yВ - yА; zВ - zА}
МОДУЛЬ (ДЛИНА) ВЕКТОРА:- расстояние от начала до конца
вектора. Модуль вектора с помощью его координат определяется:|a|
= =![]() Модуль вектора | АВ| =
Модуль вектора | АВ| =![]() cовпадает с формулой расстояния
между точками. А и В.
cовпадает с формулой расстояния
между точками. А и В.
В заданном базисе любой вектор линейного пространства однозначно определяется своими координатами Ecли два вектора равны, то равны их координаты, следовательно равны модули и направляющие косинусы
Сложение векторов: координатной форме a ± b={àx ± bx; ay ± by; az ± bz}.
Коллинеарность
векторов a =lb, причем |a |=|l | b| - условие коллинеарности в
координатной форме имеет вид: .
.
Иногда удобно представлять вектор не в виде строки составленной
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.