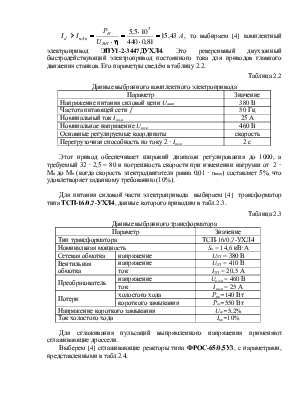
















Таким образом выбираем [4] автоматический выключатель А3725Б. Параметры данного автомата приведены в табл. 2.6.
Таблица 2.6.
Данные выбранного автоматического выключателя
|
Параметр |
Значение |
|
Тип автоматического выключателя |
А3725Б |
|
Род тока |
переменный |
|
Номинальное напряжение |
380 В |
|
Количество полюсов |
3 |
|
Номинальный ток |
|
|
Выключателей |
250 А |
|
Электромагнитных расцепителей |
250 А |
|
Тепловых расцепителей |
250 А |
|
Уставка по току срабатывания |
|
|
Электромагнитных расцепителей |
2500 А |
|
Тепловых расцепителей |
290 А |
3. РАСЧЁТ ПАРАМЕТРОВ ЭЛЕКТРОПРИВОДА
Рассчитаем параметры электродвигателя:
Ток якоря:  А.
А.
Нормированное значение температуры окружающей среды:
t00 = 40° С.
Допустимое превышение температуры окружающей среды для двигателей серии 2П:
τ = 125° С.
Температура частей двигателя:
tР = τ + t00 = 125 + 40 = 165° С.
Сопротивление якоря с учётом изменения температуры:
Rяt = (RЯД + RДП) ·(1 + α · Δt) =
= (1,28 + 1 ) · (1 + 0,004 · (165 - 15)) = 3,6 Ом, где α = 0,004 – температурный коэффициент.
Номинальный магнитный поток двигателя:
 ;
;
где  .
.
Номинальный электромагнитный момент двигателя:
 .
.
Минимальный магнитный поток двигателя:
 ;
;
где  .
.
Электромагнитный момент двигателя на максимальной скорости:
 .
.
Индуктивность якорной обмотки:
 , где
, где ![]() - для компенсированных машин;
- для компенсированных машин;
![]() - число пар полюсов ЭД.
- число пар полюсов ЭД.
Рассчитаем параметры силового трансформатора:
Активное сопротивление обмотки трансформатора:
 Ом, где
Ом, где ![]() - число фаз трансформатора.
- число фаз трансформатора.
Полное сопротивление обмотки трансформатора:
![]()
 Ом.
Ом.
Индуктивное сопротивление обмотки трансформатора:
![]() Ом.
Ом.
Индуктивность обмотки при частоте напряжения сети:
 .
.
Коммутационное сопротивление:
 , где
, где ![]() - для мостовой схемы
преобразователя.
- для мостовой схемы
преобразователя.
Суммарные сопротивление и индуктивность якорной цепи:
![]() Ом;
Ом;
![]() мГн.
мГн.
Определим некоторые параметры электропривода:
Момент инерции системы: максимальный: ![]() ;
;
минимальный: ![]() ;
;
где Jmax и Jmin – максимальный и минимальный, соответственно, приведенные моменты инерции план-суппорта и вращающихся масс.
Электромагнитная постоянная времени:
 .
.
Электромеханическая постоянная времени:
- в первой зоне регулирования скорости:
максимальная:  , минимальная:
, минимальная: 
- во второй зоне регулирования скорости:
максимальная:  , минимальная:
, минимальная: 
Рассчитаем постоянные времени, коэффициенты передачи обратных связей и узлов, входящих в схему контуров регулирования.
Постоянная времени преобразователя якорной цепи:
где р = 6 – пульсность трехфазной мостовой схемы выпрямления.
Коэффициент передачи преобразователя якорного канала:
 , где
, где ![]() – ЭДС холостого хода:
– ЭДС холостого хода:

Uу = 10 В – напряжение управления;
kСх – схемный коэффициент трёхфазной мостовой схемы.
Коэффициент обратной связи по току якоря:
где UЗТН = 5В – напряжение задания тока
Коэффициент обратной связи по скорости:
 , где UЗС=
5В – напряжение задания скорости;
, где UЗС=
5В – напряжение задания скорости;
ωн = 167,47 рад/с – номинальная скорость двигателя.
Коэффициент передачи преобразователя канала возбуждения:
 , где
, где ![]()
kСхВ – схемный коэффициент однофазной мостовой схемы.
Постоянная времени для ТПВ:
 мс, где р = 2 – пульсность однофазной мостовой схемы выпрямления.
мс, где р = 2 – пульсность однофазной мостовой схемы выпрямления.
Коэффициент обратной связи тока возбуждения:

Коэффициенты влияния сетевого напряжения определяются видом силовой схемы соответствующего преобразователя и имеют значение, обратное схемному коэффициенту:
- по каналу якоря:
- по каналу возбуждения:
4. СОСТАВЛЕНИЕ СХЕМЫ УПРАВЛЕНИЯ СТАНКОМ
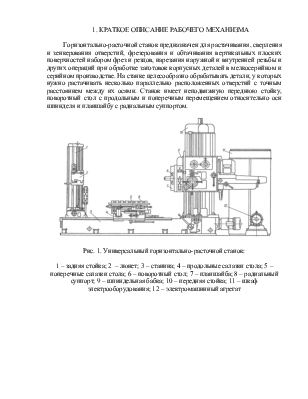
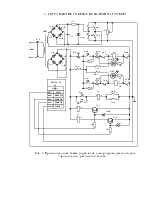
Рис. 2. Принципиальная схема управления электроприводом шпинделя горизонтально-расточного станка
Принципиальная схема управления электроприводом шпинделя горизонтально-расточного станка состоит из автоматического выключателя QF3, понижающего трансформатора TR2, двух диодных мостов на диодах VD1÷VD8, реле постоянного тока, фильтра С1, схемы стабилизации напряжения на резисторе R1 и стабилитроне VD9, кнопок управления SB1, SB2 и SB3, потенциометра RP1; схемы на транзисторах VT1 и VT2, диодах VD10, VD11 и резисторах R2 и R3, подключенной по схеме ключа.
Для управления вращением шпинделя станка достаточно подать напряжение UЗС = ±10 В на вход задатчика интенсивности выбранного электропривода ЭПУ1-2-3447ДУХЛ4 (конт.28В вилки Х1). При подаче плюс 10 В двигатель (соответственно и шпиндель станка) вращается вперёд, а при подаче минус 10 В – назад. Регулирование скорости в первой зоне происходит подачей на вход ЗИ напряжения ±5 В, а во второй зоне – подачей ±10 В. Если быть точнее, то регулирование скорости двигателя от заданных 43,75 до 1400 об/мин производится напряжением от 0,137 до 4,375 В. Максимальная же скорость 3500 об/мин достигается напряжение задания 10,94 В. Регулировка этого напряжения производиться потенциометром RP1. Знак напряжения задания определяют контакты реле К1 и К2. Когда срабатывает реле К1 на задатчик интенсивности ЭПУ подаётся плюс UЗС, а при срабатывании К2 – минус UЗС. Таким образом, в первом случае шпиндель вращается вперёд, а во втором – назад. Вращение двигателя вперёд осуществляется нажатием кнопки SB2, а назад – SB3.
Проследим как происходит разгон двигателя вперёд. Нажатием кнопки SB2 происходит подача напряжения на катушку реле К1, контакты К1.1 и К1.2 которого замыкаются, подавая тем самым на вход ЗИ положительное напряжение задания. Реле К1 и К2 не должны включится одновременно. С целью предотвращения этого аварийного режима предусмотрены размыкающиеся контакты К2.4 в цепи реле К1, а К1.4 в цепи реле КМ2. Также частично это осуществляют кнопки SB2 и SB3. В принципе, этот аварийный режим не так уж и страшен, так как ток будет ограничиваться резистором R1. Так что можно было бы обойтись и без этих блокировок.
Запуск двигателя назад осуществляется аналогично. На вход ЗИ подаётся отрицательное напряжение задания.
Торможение двигателя – рекуперативное. То есть для того, чтобы осуществить торможение, нужно отключить выпрямительную группу тиристоров и подключить инверторную. Когда скорость двигателя будет равнять нулю, то отключить и инверторную группу, чтобы двигатель не стал вращаться в противоположную сторону.
Данной схемой управления это осуществляется следующим образом. Например, двигатель вращается вперёд и мы хотим его затормозить. Для этого мы нажимаем кнопку SB1, при этом обесточивается та цепь, по которой питается катушка К1 и положительное напряжение снимается со входа ЗИ.
Теперь мне нужно, чтобы были два сигнала, которые фиксируют направление
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.