Параметры демпфирующей цепочки рекомендуется выбрать в пределах:
Rg= 20. . .40Ом, Сg= 0,25. . .2 мкФ
Мощность резистора демпфирующего устройства выбирается в пределах:
Pg= 10. . .15Вт
5. Вычисляем угол коммутации
При ![]()

При ![]()

6.Разработать функциональную схему системы управления тиристорами.
Управление преобразованием осуществляется включением вентилей в определённые моменты времени, а назначение систем управление заключается в генерировании импульсов управления, распределении и подаче их на управляющие выводы.
В преобразователях в естественной коммутацией и выпрямителях применяются системы фазового управления. Реализация основной функции управления осуществляется подачей импульсов и включением вентилей в определённой фазе относительно питающей сети.
В схемах управления “две обратные звезды с уравнительным реактором” необходимо подавать управляющие импульсы так, чтобы схема не переходила в шестифазный режим. Высокая симметрия управляющих импульсов обеспечивается одноканальными системами управления.
В одноканальной системе управления фазовый сдвиг формируется для всех фаз одним синхронизирующим и одним фазосдвигающим устройствами. Не симметрия управляющих импульсов определяется только точностью синхронизации системы управления с питающей сетью и не превышает 0,50.
Система управления состоит следующих устройств:
ФСУ - предназначен для преобразования фазы напряжения управления в соответствующее фазовое положение импульсов, подаваемых на управляющие выводы тиристоров. В данном случае мы используем вертикальный принцип управления, при котором опорное напряжение сравнивается с напряжением управления. При изменении управляющего напряжения изменяется фаза импульсов, подаваемых на тиристоры. В качестве опорного напряжения может использоваться синусоидальное синхронизирующее напряжение. В момент равенства этих напряжений происходит формирование управляющих импульсов.
УС - устройство синхронизации. Данное устройство предназначено для обеспечения синхронизации последовательности импульсов управления, подаваемых на тиристоры, с сетевым питающим напряжением.
ПрИ - преобразователь импульсов является основной логической частью системы управления, осуществляет все операции по преобразованию и распределению импульсов. Основное значение логической части системы управления - преобразование одноканальной последовательности импульсов в многоканальную и распределение их по фазам преобразователя. Импульс, подаваемый на основные тиристоры, задерживается на время импульса, подаваемого на коммутирующие тиристоры. Такое преобразование производится в каждом канале системы управления.
ВУ - выходные устройства системы управления предназначены для формирования импульсов управления и подачи их на управляющие выводы тиристоров.
Система работает следующим образом:
Фазосдвигающее устройство ФСУ запускается при поступлении с синхронизирующего устройства УС напряжения. Это напряжение сравнивается с напряжением управления. В момент сравнения синусоидального синхронизирующего напряжения и управляющего напряжения устройство сравнения вырабатывает импульс, который через преобразователь импульсов ПрИ поступает на формирователь импульсов ФИ и дальше через выходные устройства ВУ на тиристоры выпрямителя.
7.Разработать и рассчитать защиту преобразователя от внутренних к.з.
Рассмотрим случай “глухого” к.з. между выводами вентильной обмотки трансформатора a, b, т. е. в цепи переменного тока, отличаясь лишь тем, что ток к.з. проходит в один полупериод через диоды 1 - 4, во второй через 3 - 2. Для определения тока в них можно воспользоваться методикой расчета токов к.з. в цепях переменного тока, учтя лишь выпрямительное действие диодов.
Дифференциальное уравнение, определяющее ток к.з. в рассматриваемом случае (без учета выпрямительного действия диодов), принимая Э.Д.С. вентильной обмотки Е2л = const и учитывая, кроме индуктивного сопротивления трансформатора и питающей сети Ха, также активное сопротивление обмоток трансформатора Ra, получим в виде:
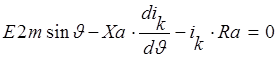
Решая это уравнение, находим:

Где id0 - мгновенное значение выпрямленного тока в момент возникновения к.з. y - угол , соответствующий этому моменту (начальная фаза). t = Xa/(wRa)=0,05с. j = arctg(Xa/Ra)
Ток id0 представляет относительно Iкm величину малого порядка
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.