Содержание
Введение……………………………………………………………………………….4
1. Структурно – кинематический анализ………………………………………..5
1.1 Структурный анализ…………………………………………………….5
1.2 Кинематический анализ………………………………………………...6
2. Силовой анализ………………………………………………………………...9
2.1 Определение сил инерции и сил тяжести……………………………...9
2.2 Силовой расчет группы 2 – 3 …………………………………………..9
2.3 Силовой расчет ведущего звена………………………………………10
2.4 Определение уравновешивающей силы методом Н.Е. Жуковского.11
3. Динамический синтез механизма……………………………………………12
3.1 Определение приведенной силы или приведенного момента сил….12
3.2 Приведенный момент инерции……………………………………….13
3.3
Построение диаграммы
энергомасс ![]() и определение момента
инерции махового колеса………………………………...…14
и определение момента
инерции махового колеса………………………………...…14
4. Анализ и синтез зубчатого механизма………………………………………16
4.1 Передаточные отношения…………………………………………..…16
4.2 Синтез открытой передачи……………………………………………16
4.3 Исследование зубчатого привода…………………………………..…19
4.4 Сравнение результатов………………………………………………...21
5. Синтез кулачкового механизма……………………………………………...21
5.1 Построение графиков движения толкателя………………………….21
5.2 Определение основных размеров кулачка…………………………...23
5.3 Построение профиля кулачка…………………………………………23
Список литературы …………………………………………………………………24
Введение
В ускоренном развитии науки и техники ведущая роль принадлежит машиностроению. Создание высокопроизводительных машин и аппаратов, их квалифицированная эксплуатация требуют от будущих специалистов глубоких знаний в области проектирования и исследования механизмов и машин. В решении этих задач важнейшая роль принадлежит теории механизмов и машин. В данной курсовой работе исследован механизм фанерострогального станка. Этот станок широко используется в деревообрабатывающей промышленности, для производства шпона, который в дальнейшем идет для облицовки мебели, пластиковых и аллюминевых окон и др.
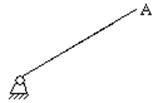
1. Структурно – кинематический анализ
1.1 Структурный анализ
Цель:
1. Определить число степеней свободы;
2. Число структурных групп Ассура их класс, порядок и вид.
Число степеней свободы:
W = 3n – 2p5 – p4
n – число подвижных звеньев;
p5 – число кинематических пар пятого класса;
p4 – число кинематических пар четвертого класса.
W = 3*3-2*4=1
|
№ звена |
Схема |
Класс |
Порядок |
Вид |
|
2,3 |
|
2 |
2 |
2 |
|
1 |
|
1 |
1 |
- |
Таблица 1.
1.2 Кинематический анализ
Цель:
1. Определение 8 положений
2. Траектории движения различных точек, их скоростей и ускорений, а также угловых скоростей и ускорений.
1.2.1. Построение 8 положений
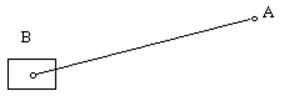
Размеры звеньев:
ОА = 0,4 м; АВ = 1,6м
Масштаб:
__
АВ – длинна звена на схеме.
![]() = 0,01 м/мм
= 0,01 м/мм
1.2.2. Построение плана скоростей.
Скорость тачки А:
n – число оборотов кривошипа
VA= (3,14*40/30)*0,4=1,674667м/с = 1,675 м/с
Масштаб:
__
ра – отрезок на плане скоростей
![]() = 0,02 м/с*мм
= 0,02 м/с*мм
Скорость точки тела, совершающего плоское движение:
__ __ __
VB = VA + VBA
__
VА– скорость полюса
__
VBА – скорость вращения вокруг полюса
__
VB= pb * ![]() ;
;
Результаты заносятся в таблицу
|
№ п/п |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
VB, м/с |
0 |
0,96 |
1,65 |
1,44 |
0 |
1,35 |
1,74 |
1,02 |
|
|
4,2 |
3,23 |
0,38 |
2,7 |
4,7 |
3,3 |
0,45 |
2,78 |
Таблица 2.
Построение плана скоростей на листе 1 ![]() направлен
направлен
![]() ОА;
ОА; ![]()
![]() АВ.
АВ.
1.2.3. Построение плана ускорений
Ускорение точки А:
аА= ![]() *ОА
= 4,22 * 0,4 = 7,056 м/с2
*ОА
= 4,22 * 0,4 = 7,056 м/с2
Масштаб:
![]() - отрезок на плане ускорений
- отрезок на плане ускорений
|
0,15 |
47,04 |
|
0,1 |
70,56 |
![]() =
=
Принимаю ![]() =0,1 м/с2*мм
=0,1 м/с2*мм
![]() =70,5 мм ( || ОА; А
=70,5 мм ( || ОА; А![]() 0)
0)
Вектор ускорения ![]() проводится из полюса
проводится из полюса ![]() параллельно ОА по
направлению к центру вращения О.
параллельно ОА по
направлению к центру вращения О.
Ускорение точки В:
![]()
Вектор  направлен из конца
направлен из конца
![]() параллельно АВ в
сторону от В к А. Через конец
параллельно АВ в
сторону от В к А. Через конец  проводим
прямую, перпендикулярную АВ. Из полюса
проводим
прямую, перпендикулярную АВ. Из полюса ![]() горизонтально
до пересечения с этой прямой проводим вектор
горизонтально
до пересечения с этой прямой проводим вектор ![]() .
.
Результаты заносим в таблицу.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.