Министерство общего и профессионального образования
Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА №2.
|
По дисциплине __________________________________________________________
________________________________________________________________________
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
|
Тема:____________________________________________________________________
_________________________________________________________________________ _________________________________________________________________________
|
|||
|
Автор: студент гр. _______ ________________ /_______________/
(подпись) (Ф.И.О.)
ОЦЕНКА: _____________
Дата: ___________________
ПРОВЕРИЛ
|
|
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2002 г.
Задание: для данного механизма найти крайние положения, построить план положений; для каждого найденного положения построить планы скоростей; для каких-либо двух симметричных положений построить планы ускорений; построить кинематические графики ускорения, скорости и перемещения методом графического дифференцирования и интегрирования; провести кинетостатический анализ механизма и тот же анализ методом рычага Жуковского. Вычислить уравновешивающую силу и уравновешиваю-щий момент, сравнить полученные результаты и рассчитать погрешность вычислений.
Вариант 1.Тип 2. Механизм породопогрузочной машины:
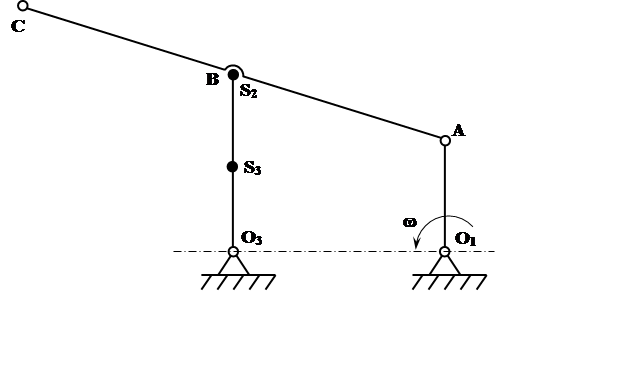 |
 В данном случае точка S2 совпадает
с точкой В.
В данном случае точка S2 совпадает
с точкой В.
Крайние положения механизма характеризуют границы рабочего и холостого хода. Первое крайнее положение механизм займёт, когда кривошип О1А будет лежать на одной прямой с шатуном АС, не накладываясь на него (т.е. φ =180˚,где φ – угол между кривошипом и шатуном); второе крайнее положение будет при наложении кривошипа О1А на шатун АС (т.е. φ =0˚,где φ – угол между кривошипом и шатуном). Первое крайнее положение характеризует конец рабочего – начало холостого хода, второе положение – начало рабочего – конец холостого хода.
Начиная с первого крайнего положения, траектория кривошипа О1А (окружность) разбивается на восемь равных частей и строится восемь положений механизма, “плюс” положение механизма во втором крайнем положении. Построение показало, что длина рабочего хода механизма примерно в два раза больше длины холостого.
Для каждого положения механизма строится план
скоростей в определённом масштабе, определяющий скорости точек и звеньев
механизма. По формуле  находим
круговую частоту вращения кривошипа, а с помощью неё по формуле
находим
круговую частоту вращения кривошипа, а с помощью неё по формуле ![]() вычисляем
скорость точки А:
вычисляем
скорость точки А:

После этого выбираем масштабный коэффициент:
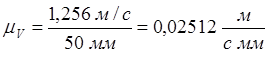
и строим планы скоростей, учитывая, что вектора полных скоростей точек всегда выходят из полюса, а вектора относительных скоростей звеньев замыкают их концы.
После построений составляем таблицу значений скоростей:
|
Положение |
VB(м/с) |
VC(м/с) |
VBA(м/с) |
VCB(м/с) |
VS3(м/с) |
|
0 |
0 |
1,256 |
1,256 |
1,256 |
0 |
|
1 |
3,215 |
6,13 |
3,215 |
3,215 |
1,6075 |
|
2 |
1,256 |
1,256 |
0 |
0 |
0,628 |
|
3 |
0 |
1,256 |
1,256 |
1,256 |
0 |
|
4 |
0,603 |
1,708 |
1,356 |
1,356 |
0,3015 |
|
5 |
1,105 |
1,784 |
1,055 |
1,055 |
0,5525 |
|
6 |
1,382 |
1,808 |
0,603 |
0,603 |
0,691 |
|
7 |
0 |
1,256 |
1,256 |
1,256 |
0,628 |
|
8 |
0 |
1,256 |
1,256 |
1,256 |
0 |
Построение планов ускорений осуществляется аналогичным способом, что и планов скоростей, с той лишь разницей, что ускорения точек и звеньев раскладываются на тангенциальные и нормальные составляющие. Точно также ускорения точек выходят из полюса, а ускорения звеньев замыкают их.
Выбираем масштабный коэффициент:

Строим планы ускорений для первого и пятого положений; вычисляем необходимые ускорения:
для первого
положения: 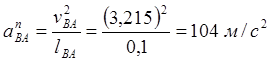
для пятого положения:
выбираем масштабный коэффициент:


По результатам построений составляем таблицу необходимых ускорений:
Положение |
аB(м/с2) |
аC(м/с2) |
аBA(м/с2) |
аCB(м/с2) |
аS3(м/с2) |
|
1 |
112 |
222 |
112 |
112 |
56 |
|
5 |
20 |
0 |
20 |
20 |
10 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.