













































1. ПОСТАНОВКА ЗАДАЧИ.. 5
1.1. Постановка задачи разработки конструкции робота для перемещения внутри труб и трубопроводов. 5
1.2. Постановка задачи окраски труб и трубопроводов. 7
2. ИНФОРМАЦИОННЫЙ ОБЗОР АНАЛОГОВ ТРАНСПОРТНЫХ СИСТЕМ... 8
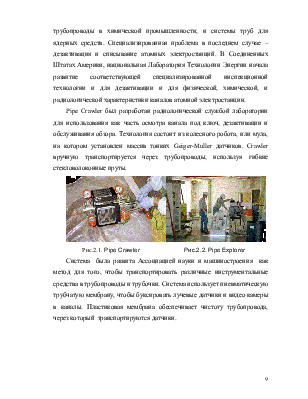
2.1. Pipe Explorer и Pipe Crawler 8
2.2. Робот для спасения людей. 11
2.3. Робот размером 450 мм для работ внутри труб. 13
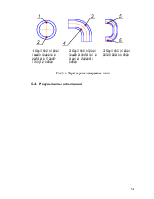
2.4. Универсальный робот Crawler FW125 для инспекции поворотных участков труб. 14
2.5. TUMO-PIPE CRAWLER для диагностики и очистки всех видов трубопроводов. 16
2.6. ИНСПЕКТОР TYP 1000-6000. 18
2.7. Робототехническое устройство “Труболаз”. 20
2.8. Эксплорер. 22
3. ВЫБОР ТЕХНОЛОГИИ НАНЕСЕНИЯ ЛАКОКРАСОЧНОГО ПОКРЫТИЯ.. 26
3.1. Параметры качества лакокрасочного покрытия труб. 26
3.2. Параметры качества покрытия внутренней поверхности труб сложной формы 28
3.3. Методы нанесения лакокрасочного покрытия. 29
3.4. Выбор инструмента для контроля качества лакокрасочного покрытия. 33
4. РАЗРАБОТКА КОНСТРУКЦИИ.. 35
4.1. Разработка технического предложения. 35
4.2. Эскизное проектирование. 39
4.3. Техническое проектирование. 43
4.3.1. Разработка чертежа общего вида. 46
4.3.2. Система управления роботом.. 47
4.4. Разработка рабочей документации и изготовление опытного образца. 48
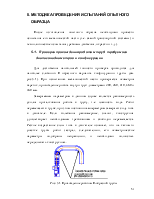
5. МЕТОДИКА ПРОВЕДЕНИЯ ИСПЫТАНИЙ ОПЫТНОГО ОБРАЗЦА.. 51
5.1. Проверка прохождения роботом труб требуемого диапазона диаметров и конфигурации. 51
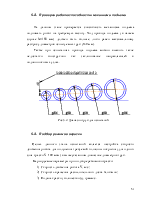
5.2. Проверка работоспособности механизма подъема. 52
5.3. Подбор режимов окраски. 52
5.4. Результаты испытаний. 54
Выводы.. 55
6. РАЗРАБОТКА НОВОЙ КОНСТРУКЦИИ.. 56
6.1. Разработка технического предложения. 56
6.2. Эскизное проектирование. 57
6.3. Техническое проектирование. 61
6.3.1. Исходные данные. 61
6.3.2. Геометрические, кинематические и силовые параметры робота. 61
6.3.3. Методика расчета. 62
6.3.4. Геометрический расчет.. 63
6.3.5. Кинематический расчет.. 66
6.3.6. Силовой расчет.. 66
6.3.7. Оптимизация конструктивных параметров робота. 68
В настоящее время существует множество трубопроводов различного назначения. Это нефтепроводы, газопроводы, трубопроводы водоснабжения, канализационные трубопроводы, вентиляционные трубопроводы.
Все эти трубопроводы имеют сложную разветвленную конфигурацию. Многие из них труднодоступны, находятся под землей. При этом возникает потребность проводить внутри трубопроводов различные операции, а именно: диагностику состояния внутренней поверхности, ремонт, прочистку, окраску, сварку и т.п.
Для осуществления этих работ необходимы устройства (роботы), способные автоматически перемещаться внутри трубопроводов и нести на себе различное технологическое оборудование.
В связи с тем, что трубопроводы имеют существенно отличающиеся геометрические параметры (диаметры, радиусы и углы изгибов, длины) и предназначены для перемещения различных сред (газ, нефть, вода и др.) роботы также должны иметь различные технические параметры и исполнения.
Таким образом, целью выполняемой работы является создание модельного ряда специальных роботов, способных перемещаться в трубопроводах сложной формы (как прямолинейных, так и изогнутых в разных плоскостях). При этом роботы должны нести на себе различные технические устройства для осуществления требуемых операций (диагностики, ремонта, очистки, окраски и др.).
Роботы должны иметь исполнение, соответствующее типу трубопровода и выполняемым операциям (взрывозащищенное, герметичное или другое требуемое исполнение). Кинематические, силовые и динамические параметры роботов (число степеней свободы, скорости, точность, грузоподъемность) также должны соответствовать геометрии трубопроводов и решаемым задачам.
В результате работы должен быть разработан модельный ряд подобных роботов, а также конструкции характерных представителей этого ряда. После изготовления роботов по разработанным чертежам должны быть проведены экспериментальные исследования роботов в условиях опытной эксплуатации в реальных трубопроводах (газопроводах, канализационных трубопроводах и др.).
При выполнении работы для достижения поставленной цели решаются следующие задачи:
1.2. Проводится анализ геометрических характеристик существующих трубопроводов (диаметры, длины, изгибы). Полученные данные должны лечь в основу геометрических и кинематических параметров роботов.
1.3. Проводится анализ типов трубопроводов. Анализируются газопроводы, нефтепроводы, канализационные трубы и водопроводы с точки зрения условий работы в них роботов. На основе полученных данных определяются требования к исполнению роботов (тип защищенности).
1.4. Разрабатываются кинематические схемы типовых представителей роботов. Рассчитываются их динамические и силовые параметры (скорости, перемещения, точности, плавность хода, грузоподъемность, мощность привода). Выбирается тип привода (электромеханический, пневматический, гидравлический), тип управления (управление оператором, программное или адаптивное управление).
1.5. Выбираются представители роботов (два представителя), создание которых наиболее актуально. Выполняется разработка конструкции этих роботов на этапах эскизного
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.