ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА АППМ
КУРСОВАЯ РАБОТА
ПО ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
на тему: «Анализ и синтез линейной непрерывной системы автоматического управления»
Вариант 9-6
Выполнил:
Факультет: МТ
Группа: КП-401
Проверил:
НОВОСИБИРСК
2007
1. ИСХОДНЫЕ ДАННЫЕ
1.1. Структура и параметры исходной нескорректированной САУ
Табл. 1.1
Алгебраические уравнения исходной САУ
|
x3 = v-y |
x4 = y3 -y4 |
x2 =y4 |
x1 = y2 - f |
Табл. 1.2
Параметры динамических звеньев исходной САУ
|
k1 |
τ1 |
T1 |
k01 |
k2 |
τ2 |
T2 |
k02 |
k3 |
T3 |
k4 |
τ4 |
T4 |
|
1.2 |
1.0 |
0.6 |
0.0 |
1.5 |
0.4 |
0.0 |
1.0 |
1.4 |
0.1 |
1.0 |
0.0 |
0.0 |
v - задающее воздействие,
f – возмущающее воздействие,
xi – входная переменная i-го звена,
yi – выходная переменная i-го звена,
y=yi– выходная (управляемая) переменная САУ.
1.2. Система обыкновенных дифференциальных уравнений, описывающих динамику звеньев исходной САУ
 ,(1.1)
,(1.1)
 ,(1.2)
,(1.2)
 ,(1.3)
,(1.3)
 .(1.4)
.(1.4)
1.3. Желаемые показатели качества переходных процессов и статическая точность регулирования
- допустимая
статическая ошибка ![]() ;
;
- максимально
допустимое время регулирования ![]() ;
;
- максимально
допустимое перерегулирование ![]() ;
;
2. АНАЛИЗ НЕПРЕРЫВНОЙ ЛИНЕЙНОЙ САУ
2.1. В соответствии с табл. 1.1 составить структурную схему линейной нескорректированной САУ
Рис. 2.1 Схема нескорректированной САУ
2.2. На основании уравнений (1.1)-(1.4) записать уравнения в операторной форме записи в общем виде и с учетом численных значений.
Табл. 2.1
Дифференциальные уравнения в операторной форме записи
|
№ исходного уравнения |
Операторная форма |
|
|
Общий вид |
С учетом численных значений |
|
|
1.1 |
|
0,6 |
|
1.2 |
|
|
|
1.3 |
|
|
|
1.4 |
|
|
2.3. Получить передаточные функции типовых звеньев структурной схемы
Табл. 2.2
Передаточные функции звеньев
|
№ звена |
Передаточная функция |
|
|
Общий вид |
С учетом численных значений |
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
2.4. Определить передаточную функцию САУ в разомкнутом состоянии
Существует три основных способа соединения звеньев в составе структурной схемы, а именно: последовательное, параллельное и соединение звеньев с обратными связями.[1] В данном случае имеется два типа соединения из трех: последовательное и с обратными связями.
При
последовательном соединении n звеньев, передаточная функция имеет вид:
Искомая функция представляет собой произведение передаточной функции отношения W4(p)/(W4(p)+1) на общую передаточную функцию звеньев 1,2,3
 .
.
С учетом табл. 2.3

Коэффициент передачи системы kраз=1,26.
2.5. Записать передаточные функции замкнутой САУ по задающему (v) и возмущающему (f) воздействиям. В зависимость от степени астатизма определить статические ошибки при нулевых начальных условиях в случае приложения единичного ступенчатого или линейно-возрастающего входных сигналов.
Замкнутая
передаточная функция по задающему воздействию имеет вид: 
Замкнутая
передаточная функция по возмущающему воздействию по (2.2), с учетом числовых
значений, имеет вид: 
Статическая ошибка равна 0, так как в системе присутствует интегрирующее звено, приложенное до f.
![]()
2.6. При помощи алгебраического критерия устойчивости Гурвица проверить условие устойчивости нескорректированной САУ.
Критерий Гурвица гласит:
Для того чтобы линейная система была устойчива, необходимо и достаточно, чтобы главный определитель матрицы Гурвица и все его диагональные миноры были положительными.[1]
![]()
Для данной САУ  .
.
![]() .>0
.>0
Следовательно, система является устойчивой.
2.7. Методом цифрового моделирования определить прямые показатели качества переходных процессов и статическую точность регулирования нескорректированной САУ по двум внешним воздействиям (v и f).
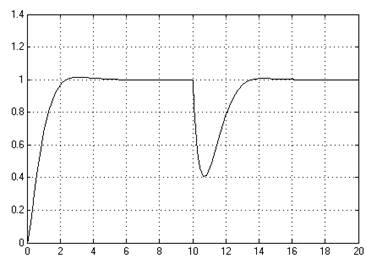
Рис. 2.3 Статическая ошибка по управлению и единичному возмущающему воздействию нескорректированной САУ
С помощью цифрового моделирования по управляющему воздействию была определена статическая ошибка (Рис. 2.3):
- статическая
ошибка ![]() ; при ступенчатых входящих задающем и
возмущающем воздействиях.
; при ступенчатых входящих задающем и
возмущающем воздействиях.
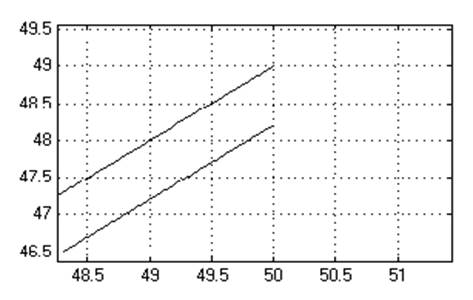
Рис. 2,4 Статическая ошибка по управлению и линейно возрастающего возмущающему воздействию нескорректированной САУ
С помощью цифрового моделирования по управляющему воздействию была определена статическая ошибка (Рис. 2.4):
![]()
Рис 2.5 Прямые показатели качества САУ
Время
регулирования ![]() ;
;
Перерегулирование ![]() .
.
Статическая ошибка и время регулирования и перерегулирование не удовлетворяют заданным условиям, следовательно, система нуждается в корректировке.
3. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА НА ОСНОВАНИИ МЕТОДА ЖЕЛАЕМОЙ ЛАЧХ
3.1. Изобразить ЛАЧХ нескорректированной системы Lнс(ω).
ЛАЧХ строится по следующему алгоритму [2]:
- На оси абсцисс отмечаются точки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.