где  – радиус
кривизны препятствия при rb<<b (см. рис. 7.5).
– радиус
кривизны препятствия при rb<<b (см. рис. 7.5).
Величина  , откуда получим окончательное
выражение
, откуда получим окончательное
выражение
 ,
аналогично
,
аналогично  .
(7.3.6)
.
(7.3.6)
Для удобства расчета выразим величины h1 иh2 через значения R, R1, H и b.
Имея координаты двух точек для прямых АС - (0, h1); (r1, z1), и СВ - (R, h2); (R-r2, z2), запишем уравнения их функций:
 (7.3.7)
(7.3.7)
 (7.3.8)
(7.3.8)
где r- расстояние от соответствующего конца трассы до точки, где определяется величина z. Учитывая, что эти прямые пересекаются в точке С, расположенной на расстоянии R1 от левого конца трассы, из (7.3.7) и (7.3.8) получим первое уравнение для определения величин h1 и h2 через известные из профиля трассы значения R, R1, H и b
 . (7.3.9)
. (7.3.9)
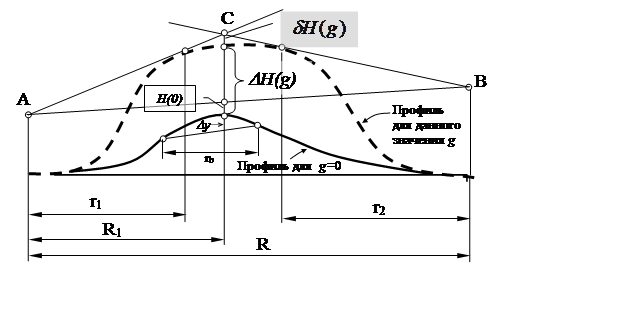
Второе уравнение получим из геометрических выражений (из подобия треугольников АВС и АFG) по профилю (см. рис. 7.5):
 , (7.3.10)
, (7.3.10)
где zc – высота точки С, которая может быть найдена из выражений (7.3.7) или (7.3.8) при соответствующих значения r=R1 (r=R-R1). В результате, второе уравнение можно записать в виде
 . (7.3.11)
. (7.3.11)
Решая полученную систему уравнений (7.3.9), (7.3.11) с учетом формул (7.2.3) и (7.3.5), определим окончательные выражения
 (7.3.12)
(7.3.12)
 . (7.3.13)
. (7.3.13)
7.4. Учет влияния рефракции на множитель ослабления
До сих пор рассматривались выражения при условии, что g=0. В реальных же условиях градиент диэлектрической проницаемости отличен от нуля, что приводит к рефракции волны, которую можно учесть заменой истинного на эквивалентный радиус Земли (aЭ)
 . (7.4.1)
. (7.4.1)
 |
Радиус аппроксимирующей сферы препятствия b(g) приближенно можно выразить формулой
 , (7.4.2)
, (7.4.2)
который можно получить из выражения (7.4.1) при k=1 (используя вместо a значение b) и несложных геометрических соображений.
Значение высоты просвета H(g) при определенной величине g можно выразить через сумму (см. рис. 7.6):
![]() , (7.4.3)
, (7.4.3)
где H(0)- величина просвета при g=0, определяемая из профиля (см. рис. 7.5); ![]()
 , получено на основании
формулы (7.4.1), как приращение высоты препятствия (zЭ(C) – zC);
, получено на основании
формулы (7.4.1), как приращение высоты препятствия (zЭ(C) – zC);
![]() - высота точки С (см. рис. 6) над препятствием при определенном значении g с учетом неравенств
- высота точки С (см. рис. 6) над препятствием при определенном значении g с учетом неравенств ![]() и
и ![]() , можно определить из
выражения
, можно определить из
выражения
 , (7.4.4)
, (7.4.4)
где
![]() ;
; ![]() , (7.4.5)
, (7.4.5)
Заменяя в формулах (7.3.11) и (7.3.12) значения H на H(g) (7.4.3) и b на b(g) (7.4.2), получим уравнение, из решения которого определим величину просвета с учетом рефракции
 (7.4.6)
(7.4.6)
После подстановки вместо Н
и b значений
H(g) и
b(g), определяемых формулами
(7.4.2) и (7.4.6) получим следуещее выражение для ![]() :
:
![]() ,
(7.4.6)
,
(7.4.6)
где
![]() ;
(7.4.7)
;
(7.4.7)
 ; (7.4.8)
; (7.4.8)
 ;
;
(7.4.9)
 ; (7.4.10)
; (7.4.10)
 ; (7.4.11)
; (7.4.11)
 ; (7.4.12)
; (7.4.12)
 . (7.4.13)
. (7.4.13)
С учетом формул (7.4.6), (7.4.10) - (7.4.13) выражение для относительного просвета можно записать в виде:
 , (7.4.14)
, (7.4.14)
где
 .
(7.4.15)
.
(7.4.15)
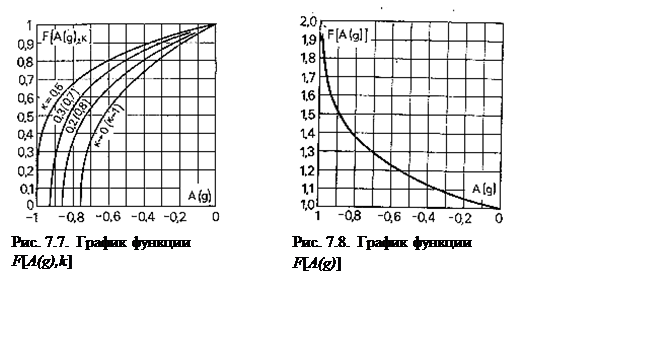
На рис. 7.7, 7.8 показаны графики функций ![]() и
и ![]() .
.
 |
При ![]() из
(7.4.14) и (7.4.15) величина относительного просвета приближенно определяется
выражением
из
(7.4.14) и (7.4.15) величина относительного просвета приближенно определяется
выражением
![]() .
(7.4.16)
.
(7.4.16)
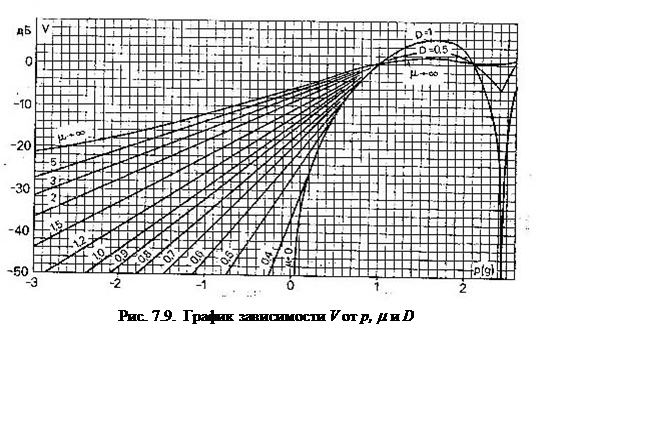 На рис. 7.9 показаны зависимости V от p(g) при различных значениях параметра
На рис. 7.9 показаны зависимости V от p(g) при различных значениях параметра ![]() в области
в области ![]() и коэффициента расходимости
D в области
и коэффициента расходимости
D в области ![]() в
предположении, что форма препятствия является выпуклой и гладкой.
в
предположении, что форма препятствия является выпуклой и гладкой.
Из анализа зависимости множителя ослабления
(см. рис. 7.9) следует, что при ![]() (трасса
соответствует идеально плоским поверхностям), для которых
(трасса
соответствует идеально плоским поверхностям), для которых ![]() , а при
, а при ![]() –
трассам с клиновидным препятствием, когда имеет место переход к оптической дифракции
Френеля. Значение V в области тени
–
трассам с клиновидным препятствием, когда имеет место переход к оптической дифракции
Френеля. Значение V в области тени ![]() в
последнем случае оказывается значительно выше, чем для препятствий выпуклой
формы с большим радиусом кривизны, поэтому клиновидное препятствие на трассе
вызывает «эффект усиления препятствия».
в
последнем случае оказывается значительно выше, чем для препятствий выпуклой
формы с большим радиусом кривизны, поэтому клиновидное препятствие на трассе
вызывает «эффект усиления препятствия».
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.