одномерные(имеют 1 вход-1 выход) и многомерные(имеют суммарное число входов и выходов ≥2), с сосредоточенны-ми и распределенными параметрами.
В динамических моделях одним из параметров является время и выходными параметрами является функция(перемещение, ускорение,скорость) от времени.
Время:
физическое (астрономическое ), математическое (абсолютное) – без конкретной привязки к чему-либо внешнему, непрерывное, дискретное – возрастающая последовательность вида {t1,t2,…,t3}.
Графики функций x(t),y(t),z(t) – временные диаграммы.
С позиций классической физики наше пространство рассматривается как трехмерное, однородное и изотропное, не зависящее от находящихся в нем материальных тел. Ньютон подразумевал два вида пространства: относительное, с которым люди встречаются путем измерения пространственных соотношений между телами, и абсолютное - пустое вместилище тел, трехмерное евклидово пространство.
4. Формы представления динамических моделей.
Динамическая модель может быть представлена в следующих формах:
– Явная функция, зависящая от времени z=z(t)
– Нелинейное алгебраическое уравнение относительная переменных явно зависящих от времени G(z(t),t)=0
– ДУ или система
– Алгебраическое ДУ
– Интегро-диф. уравнение или система
– Передаточная функция
Метод реализации – с использование подстановочной функции :
![]()
5. Виды внешних воздействий, выходные параметры динамических моделей.
Виды внешних воздействий:
-Непрерывные(функция непрерывного аргумента)
-Дискретные
-Детерминированные
-Случайные
-Одномерные
-Многомерные
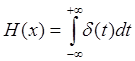
Входные воздействия описываются различными функциями, в том числе и обобщенными. Выделяют 3 типа воздействия: импульсивное, единичная ступенчатая функция, гармоническое воздействие.
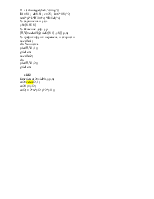
Функция Хэвизайда(ступенчата) имеет значение 0 для отрицательных и 1 для положительных аргументов.
![]() - функция
Дирака(импульсная) позволяет записать пространственную плотность физической
величины.
- функция
Дирака(импульсная) позволяет записать пространственную плотность физической
величины.
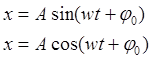
Гармоническое воздействие – явление периодического изменения какой-либо величины
6. Формы представления динамических моделей, примеры.
Смотрите 4 вопрос.
7. Задачи моделирования динамических систем.
Для динамических систем ставятся четыре группы задач:
- Задачи анализа
-Задачи синтеза(по желаемому выходному сигналу найти входной сигнал и оператор системы)
-Задачи идентификации(по заданному входному и выходному сигналам найти оператор системы)
-Обратные задачи(получить входной сигнал по заданному выходному сигналу и оператору системы)
Для динамических моделей можно проводить следующие виды анализа выходного сигнала:
-Влияние изменений начальных условий на выходной сигнал.
-Влияние изменений внутри параметров на выходной сигнал
- Влияние изменения параметров возмущающих воздействий на выходной сигнал
Для линейных динамических систем ставятся следующие задачи анализа:
-Анализ выходных процессов
– Анализ устойчивости
– Анализ чувствительности
– Анализ управляемости
8 Передаточная функция, ее получение для динамических моделей.
Передаточная ф-ция-способ мат описания динам модели.
Передаточная ф-цияпредставл диф. оператор, выражающий связь между входом и выходом системы. Зная вх сигнал системы и передаточную ф-ию, можно восстановить вых сигнал.
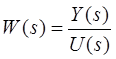 Пусть U(t) – входной сигнал, а y(t) – её выходной
сигнал. Тогда передаточная функция W(s) такой системы записывается в виде:
Пусть U(t) – входной сигнал, а y(t) – её выходной
сигнал. Тогда передаточная функция W(s) такой системы записывается в виде:
Где U(s) и Y(s) – преобразования Лапласа для сигналов u(t) и y(t) соответственно.
Получить передаточную ф-ию для механической системы по виду ДУ.
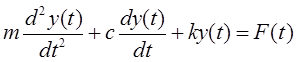 |
Выполним преобразование Лапласа
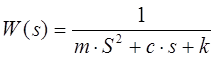
m·S2·Y(s)+c·s·Y(s)+k·Y(s)=Z(s)
Находим передаточную функцию

 |
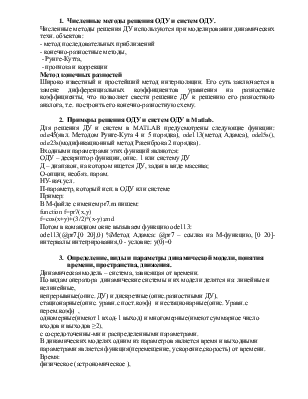
9 Исследование динамических моделей в Matlab
1) Определить ф-ю входного воздействия F(t)
2) Выполнить преобразования Лапласа над функцией F(t)
3) Задать передаточную функцию W
4)
Получить операторное
изображение выходной функции системы, умножив операторное изображение входной
функции на передаточную функцию:![]()
5) Выполнить выходной функцией обратное преобразование Лапласа, и получить функции выходного сигнала во временной области.
(дополнение вопрос 7, но особо не надо=))
10 Исследование переходных процессов в Matlab, общие положения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.