МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМЕНИ П. О. СУХОГО
Факультет автоматизированных и информационных систем
Кафедра «Информационные технологии»
ОТЧЕТ ПО ЛАБОРАТОРНОЙ РАБОТЕ № 2
по дисциплине «Компьютерные методы инженерного моделирования»
Выполнила: студентка гр. ИТ-31
Е
Принял: преподаватель
Гомель 2014
ЛАБОРАТОРНАЯ РАБОТА №2
Построение и исследование явных аналитических моделей
Цель работы: Получить навыки компьютерного моделирования технических объектов, представленных в виде явной аналитической модели с выводом результатов моделирования в численном и графическом виде.
Задача 1
Постановка задачи моделирования
1) Разработать компьютерную модель манипулятора, которая имеет следующие выходные параметры:
− значения угла поворота звена ОА в зависимости от времени;
− значения координат шарнира А и захвата С в зависимости от времени.
Результаты моделирования представить в численном и графическом виде.
2) Исследовать модель, для чего определить:
− максимальное значение координаты Y захвата манипулятора;
− значение координаты X, при котором координата Y захвата манипулятора максимальна.
Исходными данными для построения модели являются: АВ – длина звена АВ; АС – длина звена АС; ОА – длина звена ОА; вид функции закона движения ползуна, заданный аналитически; вид функции закона движения руки АС, заданный аналитически; Tk – конечное значение времени для исследования модели манипулятора.
Описание математической модели
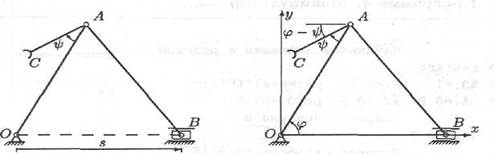
Рисунок 1 – Схема манипулятора
Механизм манипулятора (рисунок 1.1) приводится в движение двумя независимыми приводами. Задан закон движения ползуна:
S1(t) = S0 - Vb∙t
Закон движения руки АС относительно кривошипа ОА имеет вид:
Ψ(t) = Ψ0 + ω∙t
Координаты шарнира А вычисляются по формулам:
XA = OA∙ cos φ YA = OA∙ sin φ, где угол φ в зависимости от времени вычисляется по формуле:

Координаты захвата вычисляются по формулам:
XC = XA - AC∙cos(φ – ψ) YC = YA - AC∙sin(φ – ψ)
Результат выполнения
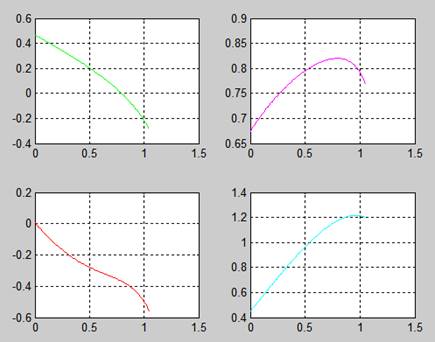
Рисунок 2 – Координаты шарнира и захвата (XA, YA, XC, YC)
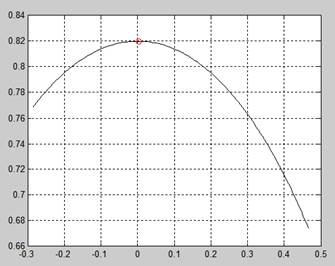
Рисунок 3 – Траектория движения точки A
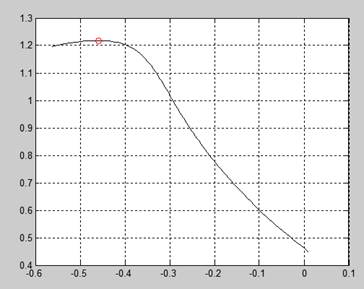
Рисунок 4 – Траектория движения точки С
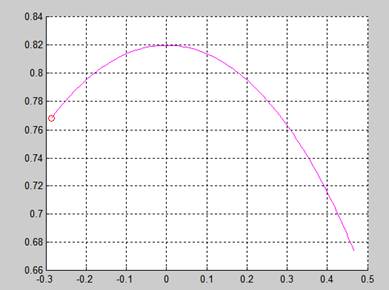
Рисунок 5 – Траектория точки A и сама движущаяся точка
Xmax для рисунка 3 - 0.002991676622859
Ymax для рисунка 3 - 0.819994542586098
Xmax для рисунка 4 - -0.459409391717378
Xmax для рисунка 4 - 1.218162713654070
Задача 2
Постановка задачи моделирования
1) Разработать компьютерную модель кулачкового механизма, которая имеет следующие выходные параметры:
– функцию аналога ускорения толкателя в зависимости от времени;
– параметры закона движения кулачкового механизма.
2) Исследовать модель, для чего определить следующие параметры:
– максимальные и минимальные значения аналога ускорения кулачкового механизма;
– значение времени, при котором аналог ускорения кулачкового механизма максимален.
Дан кулачковый механизм, закон изменения аналога, ускорения толкателя которого приведен на рисунке 6.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
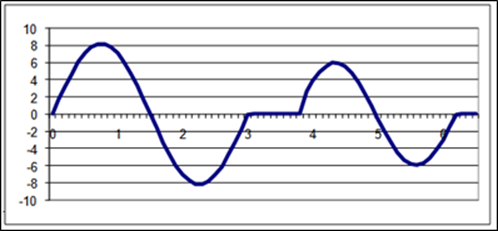
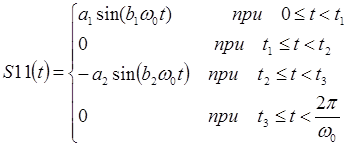
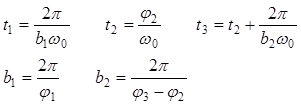
Рисунок 6 – Закон изменения аналога ускорения толкателя
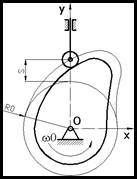
Рисунок 7 – Кулачковый механизм
Функция аналога ускорения толкателя механизма имеет вид:
Листинг M-файла
% ЗАДАЧА 1
%исходные данные
%Исходными данными для построения модели являются:
%- АВ – длина звена АВ;
%- АС – длина звена АС;
%- ОА – длина звена ОА;
%- вид функции закона движения ползуна, заданный аналитически;
% - вид функции закона движения руки АС, заданный аналитически;
%- Tk – конечное значение времени для исследования модели манипулятора.
AB=0.96, OA=0.82, AC=0.51, TK=1.05, S0=1.15,Vb=0.82,Y0=0.51,w=2.3;
t=0:0.01:1.05
%закон движения ползуна
S1=S0-Vb*t
%Закон движения руки АС относительно кривошипа ОА имеет вид
psi=Y0+w*t
%уго л фи вв зависимости от времени
fi=acos((-AB^2+S1.^2+OA^2)./(2*OA*S1))
%Координаты шарнира А вычисляются по формулам
XA=OA*cos(fi)
YA=OA*sin(fi)
%Координаты захвата вычисляются по формулам
XC=XA-AC*cos(fi-psi)
YC=YA-AC*sin(fi-psi)
figure(1)
subplot(2, 2, 1)
plot(t,XA,'-g')
grid on
subplot(2, 2, 2)
plot(t,YA,'-m')
grid on
subplot(2, 2, 3)
plot(t,XC,'-r')
grid on
subplot(2, 2, 4)
plot(t,YC,'-c')
grid on
n=1;
Ymax=YA(1);
for i=1:length(YA)
if(YA(i)>Ymax)
Ymax=YA(i)
n=i;
end
end
Xmax=XA(n);
nn=1;
Ycmax=YC(1);
for i=1:length(YC)
if(YC(i)>Ycmax)
Ycmax=YC(i)
nn=i;
end
end
Xcmax=XC(nn);
figure(2)
plot(XA,YA,'--g',Xmax, Ymax, 'or')
figure(3)
plot(XC,YC,'--g',Xcmax, Ycmax, 'or' )
figure(4)
hold on
plot(XA,YA,'-m')
ph1=plot(XA(1),YA(1),'or')
for i=1:numel(XA)
set(ph1,'XData',XA(i),'YData',YA(i))
pause(0.04)
end
% ЗАДАЧА 2
%исходные данные
fi1=1.63, fi2=2.14, fi3=4.92, a1=9.5, a2=4.0, amega0=1.256
pi=3.14
b1=2*pi/fi1;
b2=2*pi/(fi3-fi2);
t1=2*pi/(b1*amega0);
t2=fi2/amega0;
t3=t2+(2*pi/(b2*amega0));
t_kon=2*pi/amega0;
t=0:0.01:t_kon;
for i=1:1:numel(t)
if (t(i)>=0) && (t(i)<t1)
s11(i)=a1*sin(b1*amega0*t(i))
else
if(t(i)>=t1)&&(t(i)<t2)
s11(i)=0
else
if(t(i)>=t2)&&(t(i)<t3)
s11(i)=-a2.*sin(b2.*amega0.*t(i))
else
s11(i)=0
end
end
end
i=i+1;
end
hold on
Ymax=s11(1)
n=1;
for i=1:numel(s11)
if s11(i)> Ymax
Ymax = s11(i);
n=i;
end
end
Xmax = t(n);
Ymin=s11(1)
n=1;
for i=1:numel(s11)
if s11(i)< Ymin
Ymin = s11(i);
n=i;
end
end
Xmin = t(n);
figure(1);
plot(t,s11,Xmax,Ymax,'or');
plot(t,s11,Xmin,Ymin,'or');
grid on
Результаты выполнения
Значения Xmax= 0.819994542586098, Ymax= 9.497639086251352, Xmin= 0.970000000000000, Ymin= -9.498375497415026
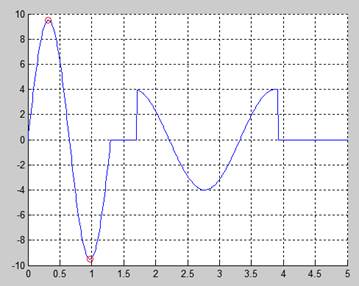
Рисунок 8 – Закон изменение аналога
Вывод: Получила навыки компьютерного моделирования технических объектов, представленных в виде явной аналитической модели с выводом результатов моделирования в численном и графическом виде.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.