8. Определение эквивалентного момента и коэффициента загрузки двигателя по нагреву.
8.1. Эквивалентный момент
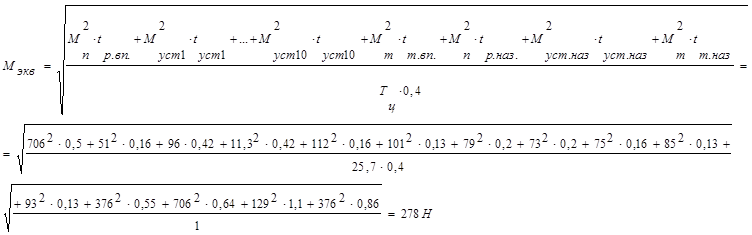
8.2. Загрузка по теплу

9. Заключение
9.1. Принятый двигатель для привода подачи пилы проходит по перегрузке и по нагреву, обеспечивая значительный запас. Учитывая возможное влияние на увеличение нагрева двигателя окружающей среды, имеющей температуру +50С, получение такого запаса оправдано.
1. 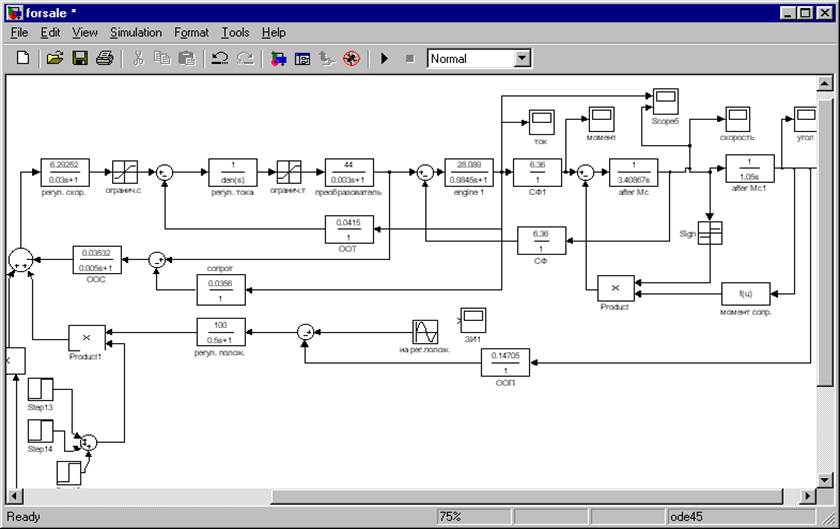
Структурная схема
Схема составлена в программной среде MathLab с учетом момента сопротивления, создаваемого кривошипно-шатунным механизмом.
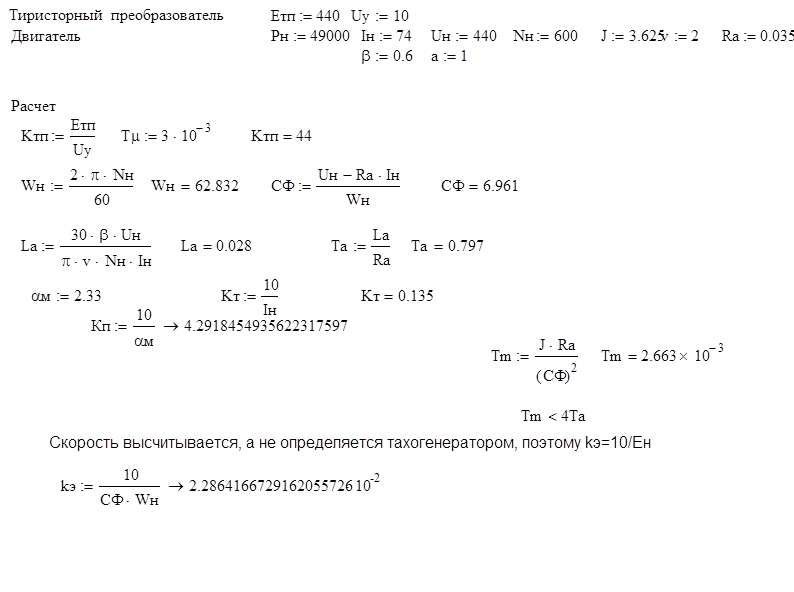
2. Расчет регуляторов
Исходя из требований к данному приводу, система содержит три регулятора:
1) регулятор тока якоря;
2) регулятор скорости;
3) регулятор положения.
Причем регулятор положения работает не постоянно, а включается в момент времени, когда механизм возвращается в исходное положение тем самым, обеспечивая точность остановки механизма.
Тогда получим такие регуляторы:
1)Регулятор тока  ;
;
2)Регулятор скорости (П-регулятор,
поскольку требуется обеспечить астатизм первого порядка) 
3)Регулятор положения 
V. РЕАЛИЗАЦИЯ МОМЕНТОВ СОПРОТИВЛЕНИЯ.
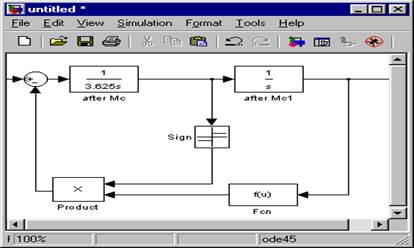 |
Также в системе предусмотрена связь с двигателем самой пилы (двигатель переменного тока типа ВА02- 355М6). Эта связь необходима для того, чтобы при увеличении нагрузки на диск пилы, скорость подачи диска уменьшалась.
 |
VI. ГРАФИКИ.
1) Сигнал с задатчика интенсивности и полученная тахограмма:
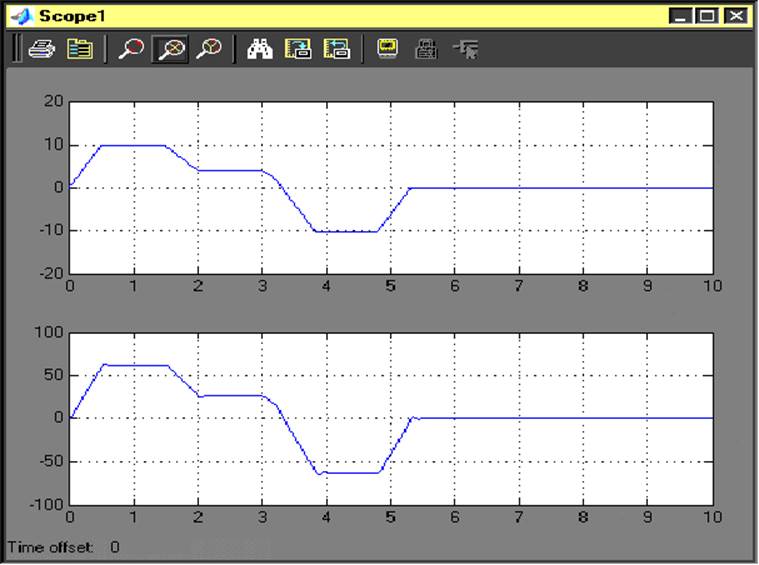 |
2) Полученная тахограмма и ток:
 |
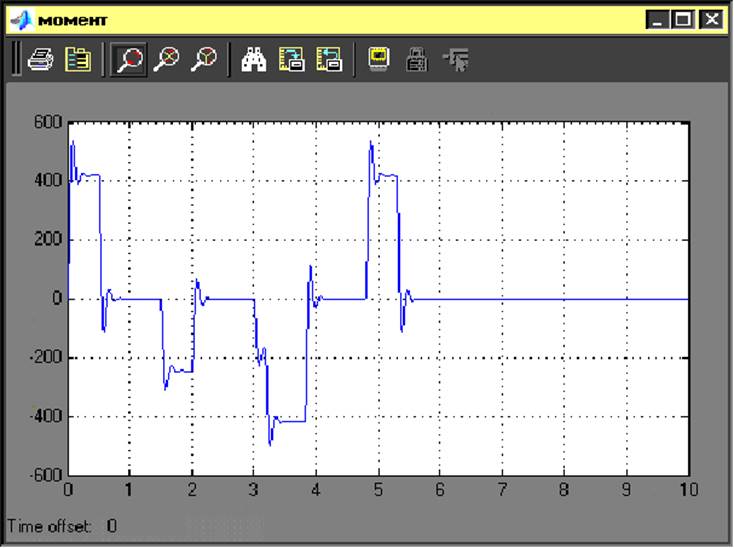
3) График момента:
 |
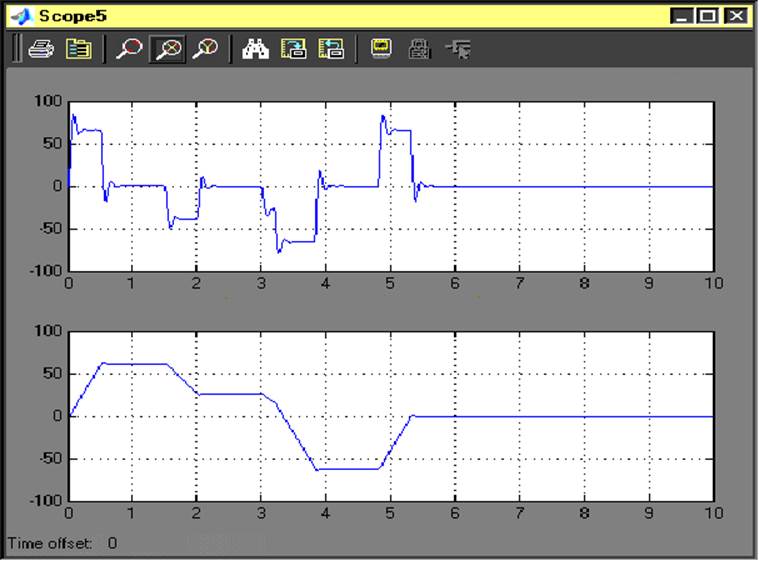
4) График скорости и тока при набросе нагрузки на диск пилы:
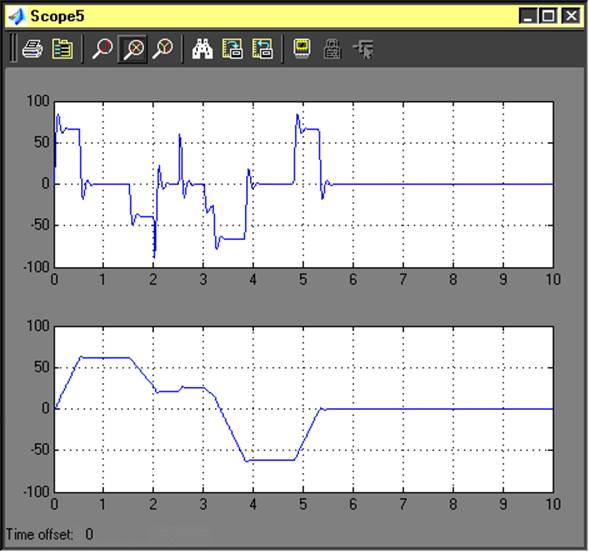 |
5) Угол поворота вала двигателя:
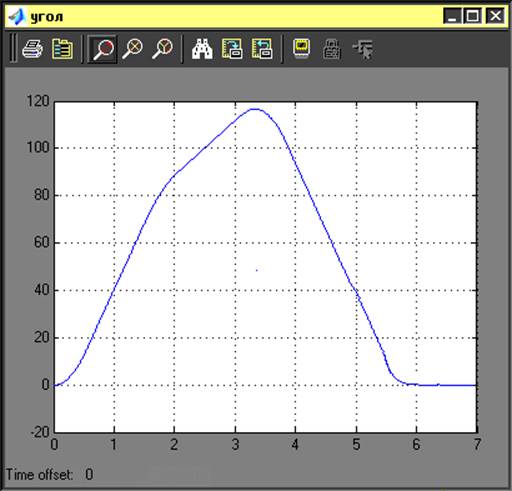 |
VII. СИСТЕМА ЗАЩИТЫ И СИГНАЛИЗАЦИИ
1. Назначение
1.1. Система защиты и сигнализации предназначена для защиты комплектного тиристорного электропривода при аварийных режимах привода и сигнализации, при аварийных отключениях дифференцировано по видам защит, о состоянии основных коммутационных аппаратов, о наличии силового напряжения и напряжения собственных нужд, о готовности электропривода к работе, а также обеспечения блокировки включения электропривода при неправильных действиях обслуживающего персонала.
2. Технические данные
2.1. система защиты и сигнализации обеспечивает следующие виды защит:
1) от внутренних коротких замыканий;
2) при превышении мгновенного значения тока предельной величины для данного КТЭ;
3) при аномальных режимах в сети собственных нужд;
4) при опрокидывании и прорыве инвертора;
5) при появлении уравнительного тока (для реверсивных КТЭ);
6) при неисправности источника стабилизированного напряжения, плюс, минус 12,6;
7) при аварийной перегрузке тиристоров по среднеквадратичному току;
8) при превышении или при снижении ниже допустимого уровня тока возбуждения электродвигателя;
9) при снижении ниже допустимого уровня или исчезновении тока обмотки возбуждения тахогенераторв;
10) при недопустимом превышении напряжения на якоре электродвигателя;
11) при превышении допустимой скорости вращения электродвигателя;
12) при выходе из строя предохранителей системы зажиты от перенапряжений и при исчезновении напряжения силовых цепей;
13) от перегрузки двигателя превышающей величину заданную в течение определенного времени до 20 s (при недопустимом времени стоянки двигателя под током);
14) силового трансформатора или реактора от токов короткого замыкания
2.2. система завиты и сигнализации имеет индикации:
1) о положении автоматических выключателей на стороне постоянного и переменного токов и пускателя;
2) о наличии силового напряжения, напряжения собственных нужд и напряжения питания вспомогательных устройств;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.