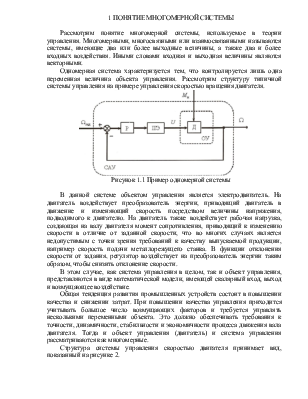
двигатель также воздействует рабочая нагрузка, создающая на валу двигателя момент сопротивления, приводящий к изменению скорости в отличие от заданной скорости, что во многих случаях является недопустимым с точки зрения требований к качеству выпускаемой продукции, например скорость подачи металлорежущего станка. В функции отклонения скорости от задания, регулятор воздействует на преобразователь энергии таким образом, чтобы снизить отклонение скорости.
В этом случае, как система управления в целом, так и объект управления, представляются в виде математической модели, имеющей скалярный вход, выход и возмущающее воздействие.
Общая тенденция развития промышленных устройств состоит в повышении качества и снижении затрат. При повышении качества управления приходится учитывать большое число возмущающих факторов и требуется управлять несколькими переменными объекта. Это должно обеспечивать требования к точности, динамичности, стабильности и экономичности процесса движения вала двигателя. Тогда и объект управления (двигатель) и система управления рассматриваются как многомерные.
Структура системы управления скоростью двигателя принимает вид, показанный на рисунке 2.
![]()
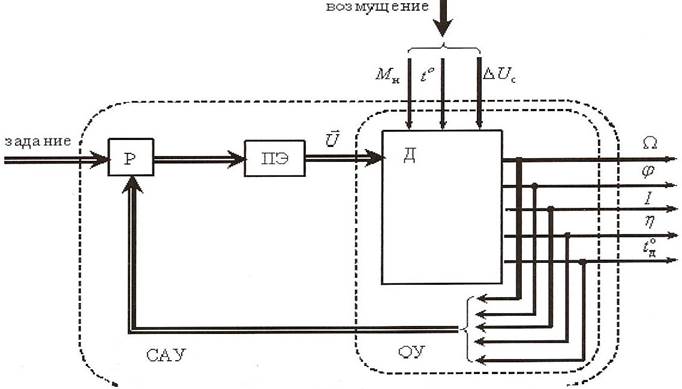
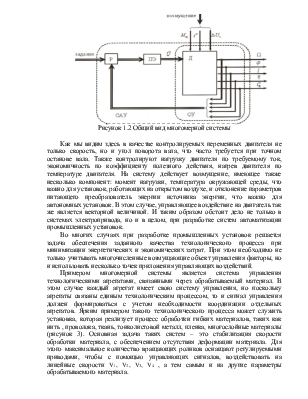
Рисунок 1.2 Общий вид многомерной системы
Как мы видим здесь в качестве контролируемых переменных двигателя не только скорость, но и угол поворота вала, что часто требуется при точном останове вала. Также контролируют нагрузку двигателя по требуемому ток, экономичность по коэффициенту полезного действия, нагрев двигателя по температуре двигателя. На систему действует возмущение, имеющее также несколько компонент: момент нагрузки, температура окружающей среды, что важно для установок, работающих на открытом воздухе, и отклонение параметров питающего преобразователь энергии источника энергии, что важно для автономных установок. В этом случае, управляющее воздействие на двигатель так же является векторной величиной. И таким образом обстоит дело не только в системах электропривода, но и в целом, при разработке систем автоматизации промышленных установок.
Во многих случаях при разработке промышленных установок решается задача обеспечения заданного качества технологического процесса при минимизации энергетических и экономических затрат. При этом необходимо не только учитывать многочисленные возмущающие объект управления факторы, но и использовать несколько точек приложения управляющих воздействий.
Примером многомерной системы является система управления технологическими агрегатами, связанными через обрабатываемый материал. В этом случае каждый агрегат имеет свою систему управления, но поскольку агрегаты связаны единым технологическим процессом, то и сигнал управления должен формироваться с учетом необходимости координации отдельных агрегатов. Ярким примером такого технологического процесса может служить установка, которая реализует процесс обработки гибких материалов, таких как нить , проволока, ткань, тонколистовой металл, пленка, многослойные материалы (рисунок 3). Основная задача таких систем – это стабилизация скорости обработки материала, с обеспечением отсутствия деформации материала. Для этого максимальное количество вращающих роликов оснащают регулируемыми приводами, чтобы с помощью управляющих сигналов, воздействовать на линейные скорости V1, V2, V3, V4 , а тем самым и на другие параметры обрабатываемого материала.
Рисунок 1.3 Моталка
Другим примером многомерной системы является манипуляционный робот или любой многозвенный механизм, каждое звено которого имеет свой привод. В этом случае входной величиной можно считать вектор управляющих сил, действующих со стороны приводов, а выходной величиной – вектор положений звеньев.
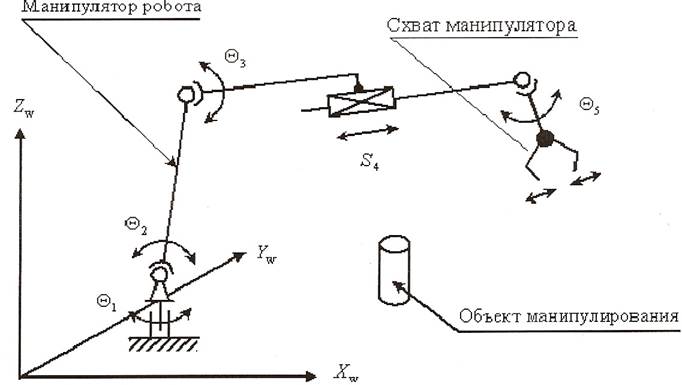
Рисунок 1.4 Манипуляционный робот
Таким образом, в приведенных примерах мы имеем объекты управления и системы с большим числом входных воздействий, то есть многомерные системы.
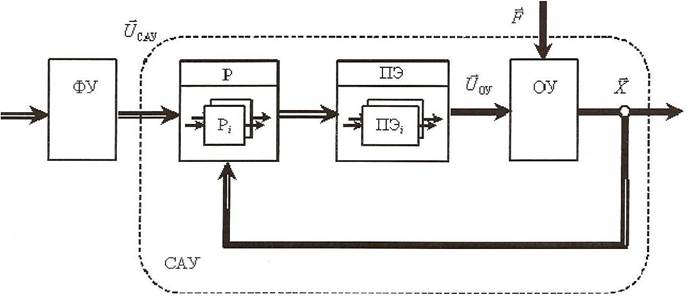
Рисунок 1.5 Обобщенная структурная схема многомерных систем
Блок формирования управления (ФУ) преобразует задание оператора в вектор управления системой. Блок регуляторов, действующий в функции отклонений измеренных регулируемых величин от заданных, управляет преобразователями энергии, которые осуществляют управляющие воздействия на объект управления.
Иначе структурную схему изображенную на рисунке 1.5, можно показать в виде системы вход-выход.
 |
|||||
 |
|||||
Рисунок 1.6 Упрощенное изображение структурной схемы
Причем:  ,
,
 ,
,  .
.
Теория многомерных систем развита в работах М.В. Меерова, А.А. Красовского, А.Г. Александрова, Е.И. Баранчука и других авторов.
Многомерные системы и объекты управления называют линейными и стационарными, если они описываются системой линейных дифференциальных уравнений с постоянными коэффициентами.
Линейная многомерная система автоматического управления описывается операторным уравнением
y(p)=W(p)u(p), (1.1)
где выходная величина y(p) и
входная u(p) – n-векторы, W(p) - ![]() -матрица
передаточных функций многомерной системы, каждый элемент которой wij(p) является передаточной функцией от j-го
входа к i-му выходу (i, j = 1, …, n).
Структура многомерной системы может быть представлена одним из способов,
представленных на рисунке 1.7.
-матрица
передаточных функций многомерной системы, каждый элемент которой wij(p) является передаточной функцией от j-го
входа к i-му выходу (i, j = 1, …, n).
Структура многомерной системы может быть представлена одним из способов,
представленных на рисунке 1.7.
 а в б
а в б
Рисунок 1.7 Структура многомерной системы: а, б – векторно-матричная;
в – структура в развернутом виде
Выражение (1.1) в развернутом виде примет вид
 (1.2)
(1.2)
Отсюда
 (1.3)
(1.3)
Многомерная система, в то же время описывается n-вектором переменных состояния x с помощью уравнений
 (1.4)
(1.4)
где А, В, С, D – квадратные матрицы ![]() , но В, С, D могут
иметь меньшую
, но В, С, D могут
иметь меньшую
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.