![]() 64
64
Министерство образования Российской Федерации
Дальневосточный государственный
технический университет ![]()
![]() (ДВПИ
им. В.В.Куйбышева)
(ДВПИ
им. В.В.Куйбышева)
ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ И ЧАСТОТНЫХ ХАРАКТЕРИСТРК ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
Методичесюае указания к лабораторной работе № 5-2 ![]() для
студентов специальности 180400
для
студентов специальности 180400
Владивосток
2004 ![]()
Одобрено научно-метдическим советом университета
519. 71 (0759)
 „Лабораторная работа № 5-2 «Исследование переходных и
частотных характеристик динамических звеньев» предназначена для студентов
специальности 180400 «Электропривод и автоматика промышленных установок и
технологических комплексов».
„Лабораторная работа № 5-2 «Исследование переходных и
частотных характеристик динамических звеньев» предназначена для студентов
специальности 180400 «Электропривод и автоматика промышленных установок и
технологических комплексов».
Методические указания составлены в соответствии с программой дисциплины «Теория автоматического управления» и содержат подробные рекомендации по выполнению лабораторной работы.
Составитель , канд. тем. наук, доцент кафедры «Автоматическое управление техническими системами».
Методичесюте указакия печатаются оригинал-макета, подготовленного автором
© ВВ. , 2004
© изд-во ДВГТУ, 2004
Лабораторная работа .N2S-1
1. Цель лабораторной работы
Целью настоящей работы является:
I. 1. Изучение основ аналогового моделирования
автоматических систем ![]() с
помощью электронной модели с периодизацией решения,
с
помощью электронной модели с периодизацией решения,
1.2 . Экспериментальное определение переходных и частотных характеристик динамических звеньев с помощью модели.
2. Основные понятия и определения
2.1 Динамические характеристики автоматической системы и ее элементов,
Поведение автоматической системы при исследовании ее поведения в динамике может быть описано с помощью дифференциальных уравнений, связывающих выходное воздействие X(t) со входными.
В общем случае для входного воздействия X0(t) уравнение имеет
вид ![]()
![]() +
...-4-ап—1 + anX(t) = dtn dtn
+
...-4-ап—1 + anX(t) = dtn dtn![]()
![]()
![]() (1)
(1)
![]()
![]()
![]() dtm d1 где а,• ; bi - постоянные коэффициенты,
зависящие от параметров системы.
dtm d1 где а,• ; bi - постоянные коэффициенты,
зависящие от параметров системы.
Применим к уравнению (1) преобразование Лапласа, полагая начальные условия нулевыми:
Х(0) = хо(0) = ХО) = Х6(0) =![]() (2)
(2)
В этом случае уравнение (1)
принимает вид ![]() р
п + + ... +an_tp
р
п + + ... +an_tp ![]() =
(bopm + blp m — l +
=
(bopm + blp m — l + ![]() (р)
, (З) где Хф) и Ир) - изображение выходного и входного воздействий; р = с + јо
- оператор Лапласа.
(р)
, (З) где Хф) и Ир) - изображение выходного и входного воздействий; р = с + јо
- оператор Лапласа.
Используя уравнение (З), образуем
сгношение ![]()
Х(р) bopm + + ...+bm-lp + РФ)
(4)
Хо(р) аор п + ар п + + ар, —1 р + ап Q(P)
где Р( р) — оператор воздействия;
Q( р) — собственный оператор.
Выражение (4) определяет собой понятие передаточной функции системы или элемента. Заметим, что в отличие от операторов системы, операторы Р( р) и Q(p) для элемента являются полиномами не выше второй степени.
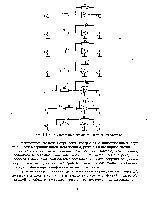
Изучая динамику системы, последнюю целесообразно представлять в виде типовых динамических звеньев, отличающихся друг от друга выражением передаточной функции.
Из всего разнообразия типовых
динамических звеньев рассмотрим несколько, наиболее часто встречающихся при
исследовании автоматических систем![]()
|
Усилительное звено |
||
|
|
(5) |
|
|
апериодическое звено
Колебательное звено |
|
(6) (7) (8) |
![]() (9)
(9)
где К — передаточный коэффициент звена;
![]() Т — постоянная времени звена; р — показатель
колебательности.
Т — постоянная времени звена; р — показатель
колебательности.
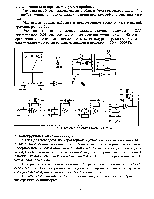
Если на вход звена или системы подать воздействие в виде единичной ступенчатой функции
![]() I при Г 2 О
I при Г 2 О
xo(t) = цо =(10) О при ts0' ![]() реакцию
(переходный процесс), вызванную возмущением (10), принято называть переходной
функцией.
реакцию
(переходный процесс), вызванную возмущением (10), принято называть переходной
функцией.
Переходную функцию можно также получить, применяя обратное преобразование Лапласа к передаточной функции (4)
X(t) ![]() —W(p)
—W(p)
![]()
При гармоническом входном
воздействии xo(t) АО sin![]()
Поведение звена или системы описывается уравнением ![]() подстановкой
подстановкой

WOO) = U(o) + jV(o) ![]()
![]() где
— вещественная частотная характеристика;
где
— вещественная частотная характеристика; ![]() мнимая
частотная характеристика;
мнимая
частотная характеристика;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.