














СОДЕРЖАНИЕ
Введение
1 Расширенное техническое задание
2 Определение элементной базы и расчет передаточных функций выбранных элементов
2.1 Выбор микропроцессора (переписать с черновика)
2.2 Выбор усилителя
2.3 Выбор электродвигателя
2.4 Выбор редуктора
2.5 Выбор датчика угла поворота
2.6 Выбор ротора ветрогенератора
3 Расчёт устойчивости системы
4 Построение логарифмической амплитудо-частотной и фазо-частотной характеристик системы и их анализ
Заключение
Список использованных источников
Приложение А
ВВЕДЕНИЕ
[ТЕКСТ ВВЕДЕНИЯ]
1 РАСШИРЕННОЕ ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА СИСТЕМУ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЕТРЯНОЙ ЭЛЕКТРОСТАНЦИЕЙ
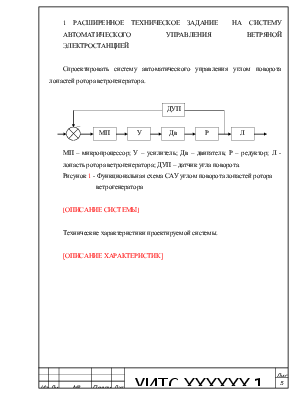
Спроектировать систему автоматического управления углом поворота лопастей ротора ветрогенератора.
 |
МП – микропроцессор; У – усилитель; Дв – двигатель; Р – редуктор; Л - лопасть ротора ветрогенератора; ДУП – датчик угла поворота.
Рисунок 1 - Функциональная схема САУ углом поворота лопастей ротора ветрогенератора
[ОПИСАНИЕ СИСТЕМЫ]
Технические характеристики проектируемой системы.
[ОПИСАНИЕ ХАРАКТЕРИСТИК]
2 ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТНОЙ БАЗЫ И РАСЧЕТ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ВЫБРАННЫХ ЭЛЕМЕНТОВ
2.1 Выбор микропроцессора
2.2 Выбор усилителя
Был выбран операционный усилитель общего применения К544УД1, имеющий универсальный комплекс статических и динамических параметров, который соответствует современным требованиям на микросхемы такого класса, что обеспечивает необходимую мощность двигателя. Интегральные схемы К544УД1 стабильны при больших емкостях нагрузки, имеют полную частотную коррекцию, не требует специальных мер при развязке по цепям питания и в тоже время имеют типовые значения частоты единичного усиления 2 МГц и максимальной скорости нарастания выходного напряжения 8 В/мкс.
Технические характеристики К544УД1.
Выходное напряжение, В 380.
Номинальное напряжение питания, В 15.
Выходная мощность, кВт 3.
Передаточная функция усилителя имеет вид:
![]() .
.
Определим коэффициент
усиления ![]() .
.
Напряжение, подаваемое на вход усилителя равно:
U1 = 15 B.
На выходе напряжение:
U2 = 380 В.
Коэффициент усиления по мощности будет равен:

Следовательно, передаточная функция усилителя:
![]()
2.3 Выбор двигателя
Выбран асинхронный трёхфазный электродвигатель АИР90L2.
Технические характеристики двигателя АИР90L2.
Количество полюсов 2.
Мощность двигателя, кВт 3.
Номинальное напряжение, В 380.
Количество оборотов в минуту 2870.
Номинальный крутящий момент, Н·м 9,98.
Отношение стартового крутящего момента к номинальному 2.
Отношение максимального крутящего момента к номинальному крутящему моменту двигателя 2,2.
Номинальный ток, А 6,1.
Отношение стартового тока двигателя к номинальному 7.
Момент инерции ротора, кг∙м2 0,0035.
Масса, кг 19,5.
Передаточная функция асинхронного трехфазного двигателя при частотном управлении определяется по формуле:

где К – коэффициент передачи двигателя;
Тэ – электромагнитная постоянная времени;
Тм – электромеханическая постоянная времени.
Коэффициент передачи двигателя по управляющему воздействию определяется по формуле:

где ω0 – угловая частота вращения вала электродвигателя;
U – номинальное напряжение.
Определим угловую частоту вращения вала электродвигателя:

где nном – номинальная частота вращения вала электродвигателя.
Следовательно,
Следовательно, коэффициент передачи двигателя равен:

Электромагнитная постоянная времени определяется по формуле:

где ω0 – угловая частота вращения вала электродвигателя;
Sk – критическое скольжение.
Определим синхронную скорость электродвигателя:

где p – количество пар полюсов.

Следовательно, синхронная скорость двигателя равна:

Определим величину номинального скольжения:

Определим величину критического скольжения по формуле:

где mk=2 - отношение стартового крутящего момента к номинальному.
Следовательно,
![]()
Следовательно, электромагнитная постоянная времени равна:

Электромеханическая постоянная времени определяется по формуле:

где ω0 – угловая частота вращения вала электродвигателя;
J – момент инерции ротора;
Sопт – оптимальная величина скольжения;
Ммах – максимальный крутящий момент.
Определим максимальный крутящий момент по формуле:
![]()
![]()
Оптимальная величина скольжения, при которой длительность переходного процесса минимальна, определяется из диапазона 0,4…0,5. Примем Sопт=0,4.
Следовательно, электромеханическая постоянная времени равна:

Таким образом, передаточная функция двигателя имеет вид:

2.4 Выбор редуктора
В качестве редуктора был выбран двухступенчатый цилиндрический соосный редуктор 4МЦ2С. Данный агрегат способен функционировать без технических пауз длительное время. Надёжная конструкция позволяет крепить его практически в любом рабочем положении: горизонтальном, вертикальном, консольном.
Технические характеристики редуктора 4МЦ2С.
Мощность двигателя, кВт 3.
Частота вращения выходного вала, об/мин 180.
Крутящий момент, Н·м 154.
Передаточное число 15,4.
Радиальная нагрузка, Н 3100.
Типоразмер электродвигателя 90L2.
Передаточная функция редуктора:


2.5 Выбор датчика угла поворота.
Для проектируемой системы был выбран бесконтактный индукционный датчик угла поворота типа БДУ-34Б-1 в корпусном исполнении.
Технические характеристики БДУ-34Б-1.
Напряжение питания, В 40.
Частота напряжённого питания, 1000.
Рабочий угол поворота ротора, град 360.
Крутизна выходного напряжения, мВ/угл. мин 6.
Максимальное выходное напряжение, В 24.
Масса, кг 0,22.
Передаточная функция датчика обратной связи БДУ-34Б-1 имеет вид:
![]() , где kу – коэффициент усиления.
, где kу – коэффициент усиления.


Передаточная функция примет вид:
![]() .
.
2.6 Выбор ротора ветрогенератора.
Выбранный для использования в синтезируемой системе ротор представляет собой трёхлопастной пропеллер, выполненный из как эпоксидной смолы, имеющий активный контроль шага винта и встроенную молниезащиту. Устанавливается против ветра. Направление вращения – по часовой стрелке.
Технические характеристики:
Диаметр ротора, м 71.
Количество лопастей, шт 3.
Заметаемая площадь, м² 3959.
Скорость вращения, об/мин 6-21,5.
Интервал скоростей ветра, м/с 28-34.
Передаточная функция такого безъинерционного звена определяется коэффициентом передачи ротора:
![]() .
.

где ωр - частота вращения ротора;
Vв – оптимальная скорость ветра, примем Vв = 31 м/с.
![]()
где n – скорость вращения ротора.


Получаем передаточную функцию ротора ветрогенератора:
![]() .
.
3 РАСЧЁТ УСТОЙЧИВОСТИ СИСТЕМЫ
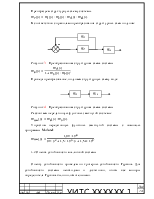
3.1 Расчет передаточной функции системы
Рассмотрим структурную схему системы автоматического управления тестомесильным аппаратом, представленную на рисунке 2.
 |
W1(p)– передаточная функция микропроцессора; W2(p)– передаточная
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.