Математически корреляционная обработка выражается в вычислении корреляционного интеграла. Пусть S(t) - ожидаемая ПСП, а Х(t) - аддитивная смесь сигнала, шума и помех. Тогда устройство корреляционной обработки (коррелятор) выполняет следующую операцию:
z(t)= .
.
При наличии на входе приемника полезного сигнала S(t), сигнал на выходе коррелятора будет равен его автокорреляционной функции (АКФ). Для всякого другого сигнала коррелятор будет вычислять взаимную корреляционную функцию(ВКФ), которая для сигналов типа ПСП значительно меньше чем АКФ. Поэтому любой другой сигнал, кроме полезного, ПСП которого генерируется в корреляторе, будет подавлен. Со спектральной позиции в корреляторе для полезного сигнала полностью снимается широкополосная модуляция и сигнал пропускается через узкополосный фильтр (интегратор). При этом улучшается в N- раз отношение сигнал/шум на выходе коррелятора. Сигнал, не соответствующий опорной ПСП остается широкополосным и значительная часть его энергии подавляется интегратором. Поэтому на выходе этот сигнал оказывается ослабленным. Аналогичные рассуждения справедливы и в отношении узкополосных помех, которые при умножении на ПСП преобразуются в широкополосную последовательность коротких импульсов и подавляется интегратором. Таким образом осуществляется кодовое разделение сигналов.
Упрощенная структурная схема приемника фазоманипулированных шумоподобных сигналов изображена на рис.3.5.6. Фазоманипулированный сигнал после предварительной селекции поступает на вход синхронного детектора, состоящего из перемножителя двух сигналов, гетеродина несущей частоты и схемы фазовой автоподстройки гетеродина. В синхронном детекторе снимается фазовая манипуляция и на выходе получается последовательность видеоимпульсов, соответствующих передаваемой ПСП, которая подается на коррелятор, состоящий из перемножителя, генератора ПСП и интегратора ( или узкополосного ФНЧ). После корреляционной обработки сигнал поступает на демодулятор, который определяет знак сигнала и соответственно вырабатывает нули и единицы в зависимости от знака сигнала на его входе.
Самым главным недостатком подобных устройств корреляционной обработки является то, что коррелятор является устройством, неинвариантным ко времени прихода сигнала. Поэтому необходимы устройства синхронизации, осуществляющие поиск сигнала во времени. Необходимость синхронизации значительно усложняет аппаратуру.
Но выполнить корреляционную обработку можно и в линейном фильтре, импульсная характеристика которого является зеркальным отображением псевдослучайной последовательности:
g(t)= A*S(Nt0-t); А - коэффициент пропорциональности.
Комплексный коэффициент передачи такого фильтра является комплексно- сопряженным со спектром сигнала :
K(w) = AS*(w) e- jwTC .
Таким образом характеристики такого фильтра определяются сигналом S(t), поэтому такой фильтр называется согласованным. Он является согласованным с сигналом S(t). Согласованный фильтр, как и коррелятор вычисляет ВКФ входной смеси и сигнала S(t). При наличии во входной смеси сигнала S(t) на выходе согласованного фильтра будет вычислена АКФ .
Что
очень важно, согласованный фильтр инвариантен во времени, его отклик не зависит
от времени прихода сигнала, и нет необходимости вести поиск сигнала по
времени. На рис. 3.5.7. изображена импульсная характеристика фильтра,
согласованного с рассматриваемой ранее ПСП. На рис.3.5.8. ... рис. 3.5.13
приведены сигналы на выходе фильтра при воздействии на его вход согласованного
сигнала (полезного), несогласованного ( мешающего) сигнала, полученного
инверсией второго элемента исходной ПСП, а также суммы и разности полезного и
мешающего сигналов. Видно, что полезный сигнал по уровню выше мешающего, хотя
мешающий сигнал имеет достаточно высокий уровень. Это объясняется тем, что
рассматриваемые сигналы имеют небольшую базу, а также тем, что мешающий
сигнал взят не из системы М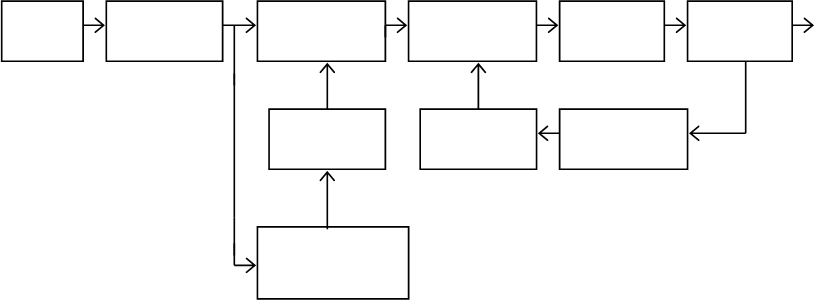
Антенна Преселектор Перемножитель Перемножитель Интегратор Демодулятор
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.