Лабораторная работа №2
Исследование понижающего преобразователя постоянного тока
(DC-DC Buck Converter)
Цель работы: изучение характеристик понижающего преобразователя постоянного тока, синтез замкнутой системы стабилизации выходного напряжения.
Ход работы:
Принципиальная схема понижающего DC-DC преобразователя представлена на рис. 2.1.
Рис. 2.1. Принципиальная схема понижающего DC-DC преобразователя
В качестве параметров преобразователя, работающего в режиме непрерывного тока (CCM – Current Continues Mode), выберем следующие значения: L=100 мкГн; C = 697 мкФ; r=0.1 Ом; fs=100 кГц; Vin = 30 В; Po=36 Вт. Коэффициент заполнения d поддерживается таким образом, что выходное напряжение преобразователя Vo=12 В.
В режиме непрерывного тока входное Vinи выходное V0напряжения преобразователя связаны соотношением:
![]() . (2.1)
. (2.1)
Зная заданную выходную мощность преобразователя Po и выходное напряжение V0, можно вычислить значение сопротивления нагрузки R:
 .
.
Следовательно, имеем R=4 Ом.
2.1. Исследование внешних и регулировочных характеристик преобразователя в режиме непрерывных токов.
Для исследования внешних и регулировочных характеристик преобразователя необходимо собрать схему на рис. 2.2.
Рис. 2.2.
Семейство внешних характеристик представляет собой зависимость V0(I0) при d=const. Соответственно, для получения внешних характеристик необходимо при неизменном d варьировать сопротивлением нагрузки R, при этом фиксируя значения выходного напряжения V0 и выходного тока I0 преобразователя.
Регулировочной характеристикой называется зависимость V0(d) при R=const.
2.2. Исследование внешних и регулировочных характеристик преобразователя в режиме прерывистых токов.
Выражение (2.1) показывает, что коэффициент передачи преобразователя по напряжению в режиме непрерывного тока зависит от d, но не зависит от нагрузки. Если выходная нагрузка уменьшается (т.е. увеличивается сопротивление R), то ток через индуктивность L становится прерывистым и справедливость выражения (2.1) нарушается. В таком случае преобразователь переходит в режим прерывистых токов.
Уменьшив в схеме на рис. 2.2 индуктивность L, тем самым добившись перехода преобразователя в режим прерывистых токов, построить регулировочные и внешние характеристики.
2.3. Исследование динамических характеристик преобразователя.
Схема для исследования динамических характеристик преобразователя представлена на рис. 2.3.
Данная модель позволяет получить переходные характеристики преобразователя при скачкообразном изменении управляющего сигнала d (рис. 2.4) и скачкообразном изменении нагрузки R (рис. 2.5).
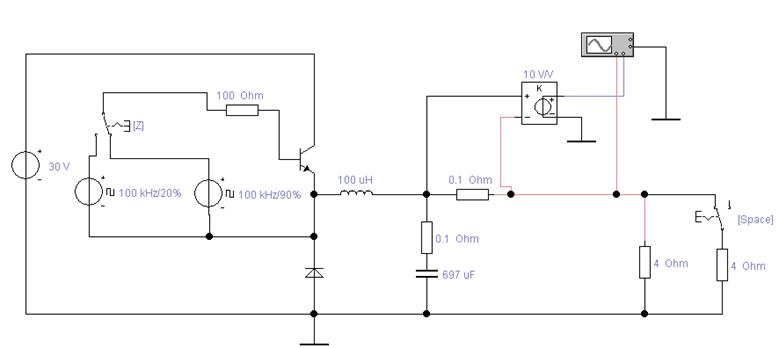
Рис. 2.4.
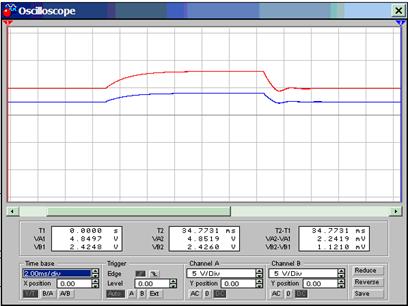
Рис. 2.4. Переходная характеристика по управлению
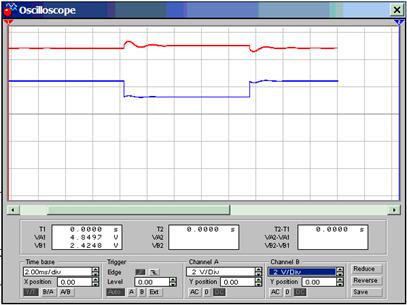
Рис. 2.5. Переходная характеристика по возмущению
2.4. Синтез замкнутой системы управления.
Блок-схема линеаризованной замкнутой системы для регулирования выходного напряжения представлена на рис. 2.6.
Рис. 2.6. Структура замкнутой системы управления
Контурная передаточная функция системы:
![]() , где GС(s)
– передаточная функция регулятора, GPWM(s)
– передаточная функция ШИМ-контроллера, GPS(s)
– передаточная функция силового каскада, kFB – коэффициент
передачи датчика выходного напряжения (делителя напряжения).
, где GС(s)
– передаточная функция регулятора, GPWM(s)
– передаточная функция ШИМ-контроллера, GPS(s)
– передаточная функция силового каскада, kFB – коэффициент
передачи датчика выходного напряжения (делителя напряжения).
Схемная реализация ШИМ-контроллера дана на рис. 2.7.
Рис. 2.7. Реализация ШИМ-контроллера
Передаточная функция ШИМ-контроллера:
 , где
, где ![]() -
малые приращения коэффициента заполнения,
-
малые приращения коэффициента заполнения, ![]() - малые
приращения управляющего напряжения,
- малые
приращения управляющего напряжения, ![]() - амплитуда
пилообразного сигнала (рис. 2.8).
- амплитуда
пилообразного сигнала (рис. 2.8).
Рис. 2.8.
Передаточная функция силового каскада:
 .
.
При определении передаточной функции регулятора GC(s) цели управления выражаются через характеристики контурной передаточной функции:
1. Частота среза fc должна быть как можно больше, чтобы обеспечить более быстрое завершение переходных процессов в системе.
2. Запас по фазе на частоте среза должен составлять приблизительно 60° для того, чтобы процессы в замкнутой системе не содержали осцилляций.
3. Фазочастотная характеристика контурной передаточной функции не должна пересекать линию j=-180° до частоты среза.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




