Лабораторна робота № 7
Симісторний однофазний регулятор змінної напруги
Симетричний тиристор (симістор) – тиристор, який при подачі сигналу на його керуючий електрод включається як у прямому, так і у зворотному напрямку.
Часто симістор вважають аналогом зустрічно – паралельного з’єднання двох звичайних тиристорів. Проте таке порівняння є не зовсім вірним. З одного боку, симістор як єдина інтегральна структура має завжди при інших рівних умовах порівняно з зустрічно – паралельними тиристорами, меншу масу та розміру, більшу надійність роботи, меншу складність схеми керування та вартість.
З іншого боку, єдина інтегральна структура симістору – приладу, який проводить струм у обох напрямках, може включатися тільки за рахунок природного спаду до нуля прямого струму (природна комутація). Тому симістори мають низькі робочі частоти (~100Гц), у той час як зустрічно - паралельне з’єднання звичайних тиристорів можуть працювати на частотах ~1кГц та вище.
Симістор характеризується критичною
частотою fКР, при перевищенні якої має місце відпирання приладу у зворотному
напрямку без подачі імпульсу керування.
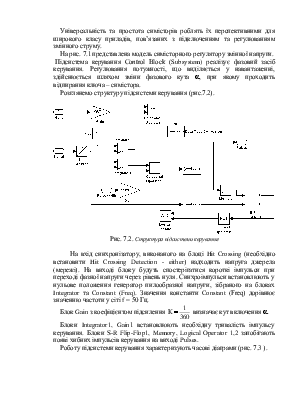
Рис. 7.1. Модель симісторного регулятора напруги
Пакет MatLab/Simulink не містить вбудованої моделі симістору, тому моделювати його будемо двома тиристорами, які включені зустрічно – паралельно.
Універсальність та простота симісторів роблять їх перспективними для широкого класу приладів, пов’язаних з підключенням та регулюванням змінного струму.
На рис. 7.1 представлена модель симісторного регулятору змінної напруги.
Підсистема керування Control Block (Subsystem) реалізує фазовий засіб керування. Регулювання потужності, що виділяється у навантаженні, здійснюється шляхом зміни фазового кута a, при якому проходить відпирання ключа – симістора.
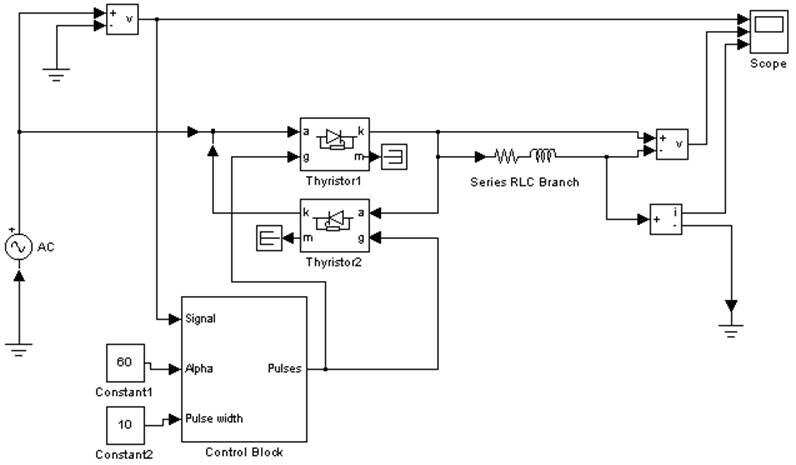
Розглянемо структуру підсистеми
керування (рис.7.2).
Рис. 7.2. Структура підсистеми керування
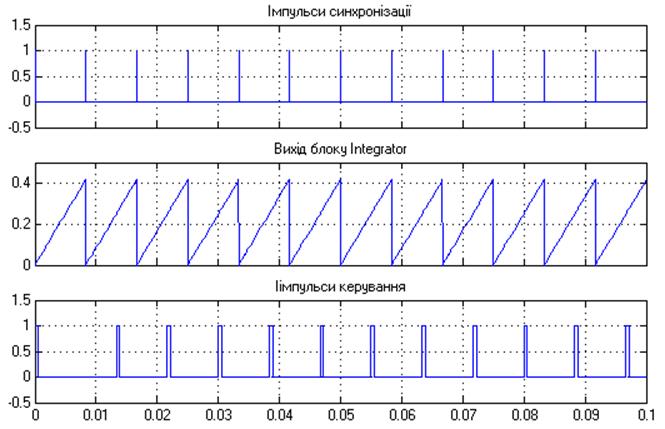
На вхід синхронізатору, виконаного на блоці Hit Crossing (необхідно встановити Hit Crossing Detection - either) надходить напруга джерела (мережі). На виході блоку будуть спостерігатися короткі імпульси при переході фазної напруги через рівень нуля. Синхроімпульси встановлюють у нульове положення генератор пилообразної напруги, зібраного на блоках Integrator та Constant (Freq). Значення константи Constant (Freq) дорівнює значенню частоти у сіті f = 50 Гц.
Блок Gain з коефіцієнтом підсилення  визначає кут включення a.
визначає кут включення a.
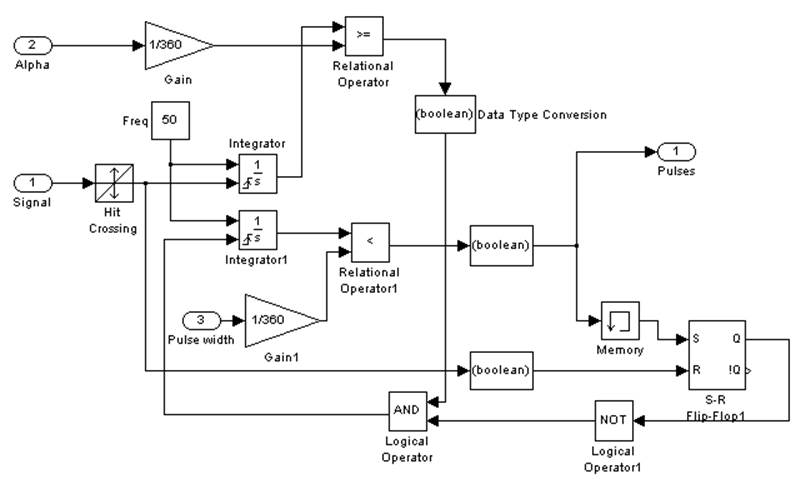
Блоки Integrator1, Gain1 встановлюють необхідну тривалість імпульсу керування. Блоки S-R Flip-Flop1, Memory, Logical Operator 1,2 запобігають появі хибних імпульсів керування на виході Pulses.
Роботу підсистеми керування характеризують часові діаграми (рис. 7.3 ).
 |
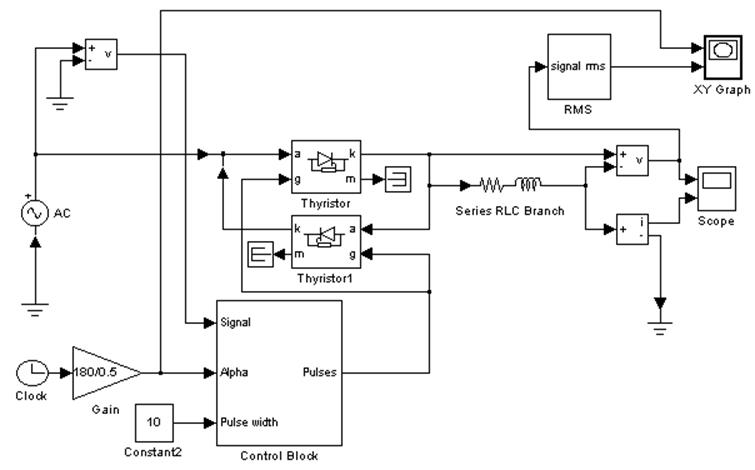 |
Рис. 7.4. Схема для зняття регулювальної
Характеристики симісторного регулятору
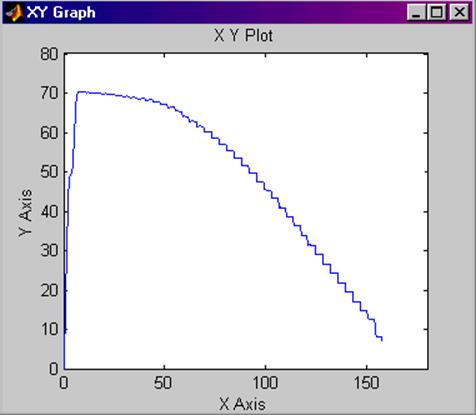
Генератор лінійно зростаючого сигналу зібраний на блоках Clock та Gain. Вибір необхідного коефіцієнта підсилення
блоку Gain виконується за формулою  , де tМ
– час моделювання. Приклад регулювальної характеристики наведений на рис. 7.5.
Приклад часових діаграм роботи
, де tМ
– час моделювання. Приклад регулювальної характеристики наведений на рис. 7.5.
Приклад часових діаграм роботи
 |
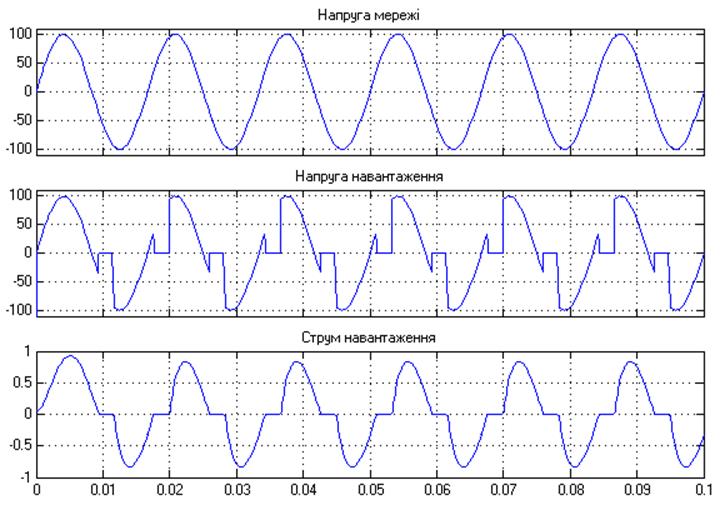 |
Рис. 7.6. Часові діаграми роботи регулятора
Виконання лабораторної роботи:
Дослідити модель симетричного регулятору напруги. Збільшуючи значення індуктивного опору, знайти його значення, при якому зникне природна комутація вентиля. Побудувати зовнішню та регулювальну характеристики. Додавши до моделі блок Fourier, провести гармонійний аналіз вихідної напруги.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.