2 - корпус манипулятора; 3 - несущая конструкция робота
ПР маятникового типа включает раму, закрепленную подвижно с вращением относительно оси Y, удерживающую корпус манипулятора, имеющего также возможность вращения относительно оси Х. Рука манипулятора имеет возможность перемещения как вдоль, так и вокруг (относительно) оси Z. Помимо этого кисть манипулятора имеет две степени подвижности и может вращаться относительно осей X1 и Y1.
Такая конструкция, а также система управления дает ПР маятникового типа ряд дополнительных, по сравнению с рассмотренными выше типами ПР, преимуществ: возможность достижения большой скорости перемещения рабочих органов с большими значениями ускорений, так как кинематическая схема ПР позволяет исключить большие значения моментов инерции; высокую точность перемещений при относительно простом управлении; высокую гибкость (шесть степеней подвижности и возможность осуществления любой комбинации перемещений); обширную и одновременно компактную рабочую зону действий.
Сочетание ПР маятникового типа с универсальным схватом, а также с механизированным и автоматизированным рабочим инструментом и системой технического зрения позволяет осуществить компоновку гибких автоматизированных сборочных комплексов, в которых система технического зрения интегрирована в общую систему управления по программе "человек - машина - коммуникация". Подобные комплексы, оснащенные комплектом сменного инструмента для автоматического завинчивания винтов и установки заклепок, устройствами для маркировки и контроля изделий, транспортным модулем для перемещения паллет с собираемым изделием, набором загрузочных устройств и магазинов для хранения и накопления паллет и деталей, могут обеспечить автоматическую сборку значительной номенклатуры изделий без применения ручного труда.
Одним из перспективных видов оборудования для сборки изделий в условиях гибкой автоматизации являются сборочные центры (рис.14), в состав которых входят: манипулятор ПР, сборочные головки, транспортное устройство подачи базовой детали, загрузочные устройства для компонентов, захватные устройства и устройства для подготовки компонентов к сборке.
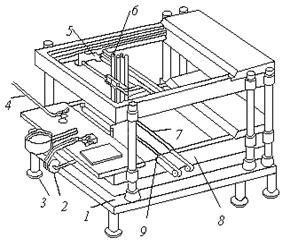
Рис.14. Сборочный центр: 1 - станина; 2, 3,4 - загрузочные устройства;
5 – манипулятор; 6 - блок монтажных головок; 7 - платы;
8 - координатный стол; 9 - транспортное устройство
Сборочные центры можно различать по числу манипуляторов и применяемых головок; типу головок и транспортных устройств для подачи базовой детали; виду и количеству загрузочных устройств. По числу манипуляторов и головок сборочные центры можно разделить на следующие группы: с одним манипулятором и одной сборочной головкой; с двумя манипуляторами и двумя сборочными головками (по одной на каждый манипулятор); с двумя манипуляторами и четырьмя сборочными головками (по две на каждый манипулятор); с двумя манипуляторами и 12 сборочными головками (по шесть на каждый манипулятор).
Автоматизированные загрузочные устройства (АЗУ) относятся к технологическому оснащению, которое обуславливает определенную специализацию сборочных центров. Так, например, сборочные центры для сборки электронных узлов по видам АЗУ можно разделить на следующие группы:
1) с несколькими многокассетными АЗУ с наклонным транспортным лотком для интегральных схем и рулонными АЗУ для подачи элементов, вклеенных в ленту;
2) с набором лотковых магазинов для подачи ИС и вибробункерных АЗУ для подачи элементов;
3) с несколькими вибробункерными АЗУ для подачи элементов и магазинами сотового типа для компонентов сложной формы;
4) с лотковым магазином для подачи ИС, вибробункерным АЗУ для подачи сложных элементов и рулонным АЗУ для подачи элементов, вклеенных в ленту.
Наличие в сборочном центре нескольких головок, установленных в блоке на одном манипуляторе (все головки имеют автономные приводы для выполнения захватных действий и вертикального перемещения), позволяет одновременно осуществлять захват различных компонентов и одновременно или в различной последовательности устанавливать их на плату.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.