МИНИСТЕРСТВО ВЫСШЕГО
И СРЕДНЕГО СПЕЦИАЛЬНОГО ОБРАЗОВАНИЯ
РЯЗАНСКАЯ ГОСУДАРСТВЕННАЯ РАДИОТЕХНИЧЕСКАЯ АКАДЕМИЯ
КАФЕДРА РАДИОУПРАВЛЕНИЯ И СВЯЗИ
по дисциплине ЦОС и МП
Тема: МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО
ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ
Выполнил: студент гр. 616
Якунин И. В.
Проверил: Езерский В. В.
Рязань 2000
Введение....................................................................................................4
1. Обзор литературы..........................................................................................5
2. Постановка задачи.........................................................................................6
3. Описание алгоритма работы устройства и расчёт основных
характеристик.................................................................................................7
4. Расчет разрядности микропроцессора.........................................................15
5. Разработка структурной схемы устройства................................................16
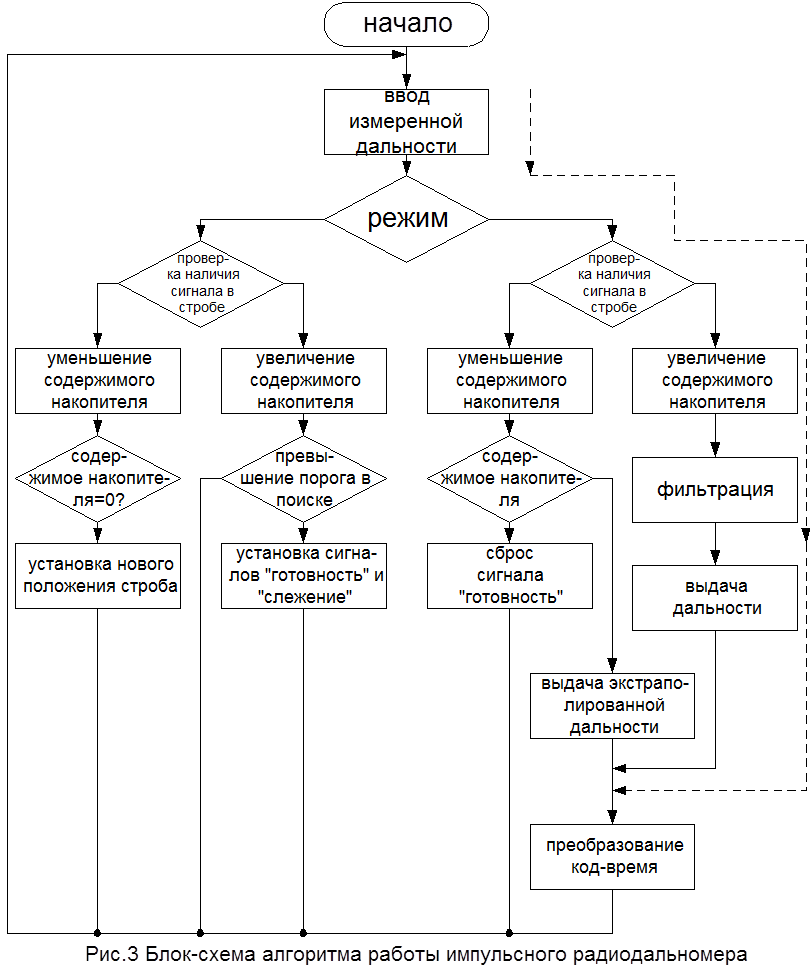
6. Разработка блок схемы алгоритма...............................................................18
7. Разработка текста программы......................................................................20
Заключение..................................................................................................21
Приложение 1 Структурная схема устройства........................................22
Приложение 2 Блок схема алгоритма.......................................................23
В настоящее время трудно представить себе авиацию без радиолокационных станций. С помощью радиолокации определяют скорость, высоту, расстояния, координаты. Аппаратура, которая выполняет задачи поиска этих параметров, становится сложнее, массивнее. Один из способов уменьшения массогабаритных показателей – использование микропроцессоров, контроллеров, сигнальных процессоров. К тому же системы, построенные на этой элементной базе, более универсальны, «гибки».
В данной курсовой работе будет рассмотрен импульсный радиодальномер на основе однокристального микропроцессора.
1. Проектирование импульсных и цифровых устройств радиотехнических систем. Под ред. Казаринова Ю. М. – М. Высшая школа. 1985 г.
2. Марков С. Цифровые сигнальные процессоры. Книга 1. – М. Микроарт. 1996 г.
В данной работе, опираясь на техническое задание, определяем задачу проектирования: необходимо смоделировать микропроцессорное устройство цифровой обработки сигналов импульсной РЛС измерения дальности.
Для этого надо выбрать подходящее схемное решение измерителя. Нам предстоит найти основные параметры и требования РЛС, выбрать математический метод решения задачи, по ним выбрать наилучший по всем показателям микропроцессор. Далее выбрать оптимальный алгоритм работы МП, разработать структурную схему устройства обработки сигнала и блок-схему, составить наиболее принципиальные, важные части программы, изобразить функциональную схему устройства программного обмена.
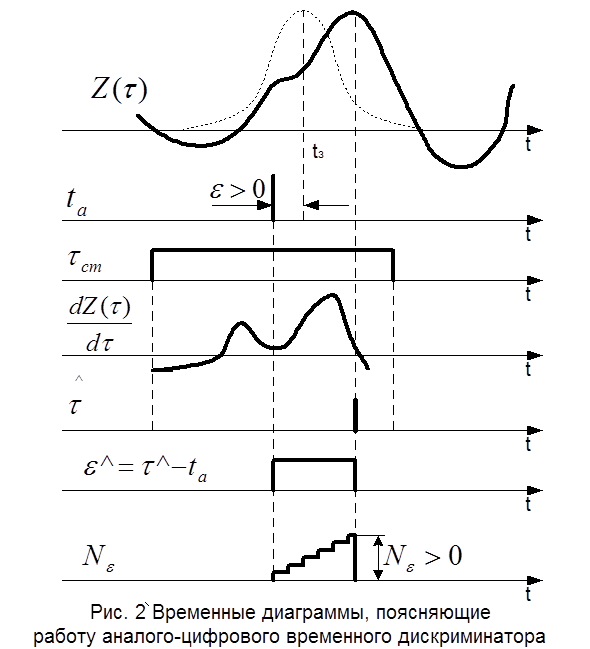
В состав РТС наряду с устройствами поиска и обнаружения сигналов могут входить так называемые дискриминаторы. Их функциональным назначением является отсчёт рассогласования текущего значения измеряемого параметра (по отношению к априорному значению) в пределах интервала селекции полезного сигнала.
Алгоритм обработки принимаемого сигнала в дискриминаторах можно условно разделить на две операции: 1) формирование характерной точки отсчёта времени прихода сигнала (эта операция называется фиксацией временного положения сигнала) и 2) определение отклонения этой точки от предполагаемого значения, выработанного ранее, на основе предшествующей обработки (фильтрации и экстраполяции измеряемого параметра).
 |
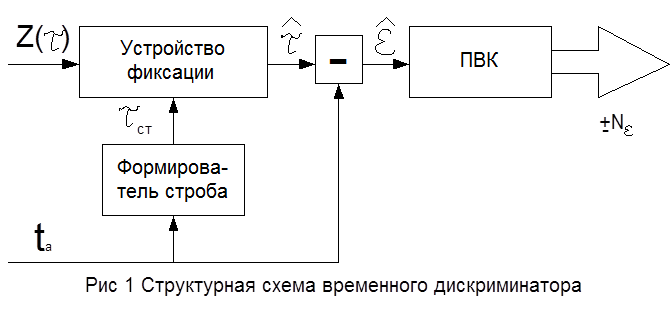
В подобных случаях роль цифровых схем, осуществляющих сопряжение дискриминатора с последующим устройством фильтрации, сводится к выполнению аналого-цифровой операции преобразования временного интервала e^ между точкой фиксации t^ и некоторым заранее выработанным (априорным) значением ta в цифровой код Ne.
Принцип построения таких дискриминаторов поясняется структурной схемой и временными диаграммами на рис 1 и 2.
 |
 |
|||
 |
![]() где сводится к
формированию функции
где сводится к
формированию функции
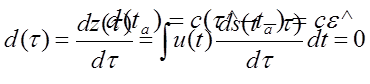 |
из которого видно, что значение
функции d(t) в точке t=ta характеризует отклонение e^ текущей оценки t^ измеряемого
параметра от выбранного ранее значения ta с
точностью до масштабного коэффициента с, зависящего от параметров полезного
сигнала и характера мешающих воздействий.
Отсюда следует, что одной из основных операций обработки сигнала в
измерительной системе является выработка значения d(ta),
пропорционального оценке e^ временного рассогласования e=tз - ta . Эту
операцию выполняет дискриминатор.
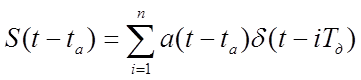 |
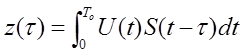
Где d-функция используется для описания периодической последовательности импульсов с известным временным положением, форма которых не играет роли с точки зрения дальнейшей обработки сигнала, так как вся информация заложена только в амплитудах импульсов.
 |
 |

Ui – выборочные значения реализации u(t) в дискретные моменты времени, соответствующие известным
моментам прихода сигнальных импульсов, а bi –
весовые коэффициенты, вычисляемые заранее для дискретных значений параметра ta. Для упрощения аппаратной реализации устройства
дискриминирования удобно принять интервал дискретизации параметра ta равным периоду дискретизации Тд.
Тогда
Результатом обработки сигнала в дискриминаторе является накопленное в регистре памяти цифровое значение функции dj , соответствующее дискретному значению аргумента taj=jTи. Как видно из двух последних формул, изменение аргумента jTи сводится к сдвигу последовательности весовых коэффициентов {bi-j, i=[1,n]} относительно последовательности принятых выборочных значений {ui, i=[1,n]}, как показано на рис. 4 для трёх значений аргумента ta, соответствующих отрицательному, нулевому и положительному рассогласованиям e.

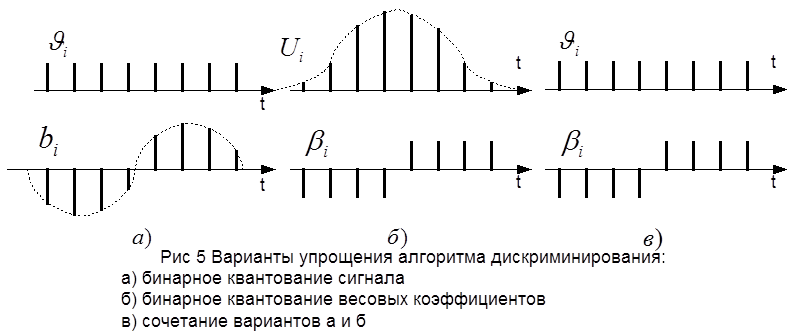
Для упрощения алгоритма работы дискриминатора и уменьшения требований
к быстродействию микропроцессора в данном случае возможно применить
квазиоптимальный метод. Варианты упрощения алгоритма
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.