![]() =0,3% [Ом]
=0,3% [Ом]
![]() =0,9% [Ом]
=0,9% [Ом]
6. погрешность индикации тока, обусловленная неточностями прибора в установке «0», в погрешности шкалы делений и др.(систематическая, случайная, инструментальная, аддитивная)
![]() =0,1% [А](задаюсь)
=0,1% [А](задаюсь)
![]() =0,1% [А] (задаюсь)
=0,1% [А] (задаюсь)
Необходимо перевести данную погрешность из А в Ом . Для этого введём весовой коэффициент К=1. δОм = δГцК.
![]() =0,1% [Ом]
=0,1% [Ом]
![]() =0,1% [Ом]
=0,1% [Ом]
Общая случайная погрешность:
![]() ;
;
δ =13,11%
Общая систематическая погрешность:
![]() ;
;
δ =0,906%
Т.к.  , то систематической погрешностью
пренебрегаем.
, то систематической погрешностью
пренебрегаем.
Измерение номинального входного сопротивления
Этот параметр очень важен при выборе усилителя для лучшего согласования
АС с ним.
Из
полученных данных найденных в предыдущем пункте найдём среднеквадратическое
значение по формуле:![]()
Структура погрешности:
Погрешность установления значения сопротивления(случайная, систематическая, инструментальная, аддитивная)
δслуч =1,06 %
δсист =0,11%
Найдём частные производные выражения:
![]()
![]() Погрешность:
Погрешность:
 ;
;
![]()
Измерение времени послезвучания
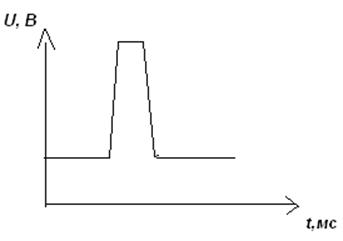
Переходная характеристика определяет на сколько хорошо сфазированы динамики в АС. В идеале импульсный отклик должен иметь следующий вид:
Из-за большой инерционности динамиков и не идеальности сфазирования головок реальная картина импульсной характеристики высококачественной АС следующая:
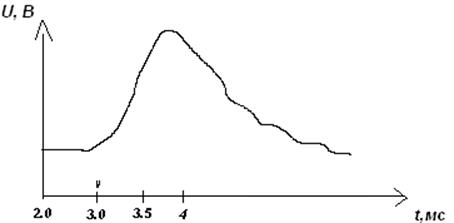
Причина этого следующая: при подаче сигнала он перераспределяется на фильтрах. Фильтры имеют различную структуру на разных полосах. В следствии этого сигнал проходит до излучателей за разное время.
Методика измерения
Необходимо использовать три микрофона, расположенных на осях излучения динамиков на расстоянии 1м.
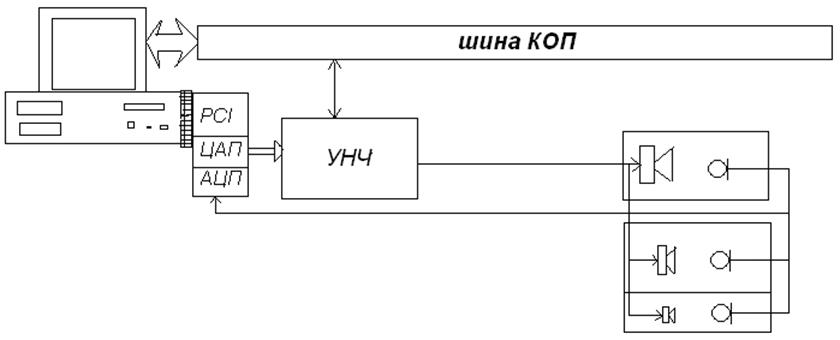
Структурная схема измерения времени послезвучания
Подаём импульсный сигнал на частоте 1кГц (т.к. на этой частоте время послезвучания максимально), который усиливается на УНЧ , затем сигнал перераспределяется на фильтрах и попадает на динамические головки. Принятый микрофонами сигналы попадают на многоканальный ЦАП. Затем
сигналы сравниваются по времени и вычисляется задержка послезвучания.
Аппаратные и программные средства вполне способны справиться с этой задачей, следовательно внешнего прибора для измерения задержки не требуется.
Структура погрешности:
1. погрешность установки частоты(случайная, субъективная, инструментальная)
![]() =0,05% [Гц](паспортные
данные)
=0,05% [Гц](паспортные
данные)
2. погрешность установки значения звукового давления(случайная, систематическая, субъективная, инструментальная, аддитивная)
![]() =0,6% [дБ](задаюсь)
=0,6% [дБ](задаюсь)
![]() =0,1% [дБ] (задаюсь)
=0,1% [дБ] (задаюсь)
Переведём
данную погрешность в Гц . Для этого введём весовой коэффициент К=0,9, тогда ![]() =0,54% [Гц]
=0,54% [Гц]
![]() =0,09% [Гц]
=0,09% [Гц]
3. погрешность непостоянства мощности (случайная, инструментальная)
![]() =0,8%
=0,8%
Переведём данную погрешность в Гц. Для этого введём весовой коэффициент К=0,6, тогда δГц =0,48% [Гц]
4.Погрешность восприятия микрофоном звукового давления, (случайная, инструментальная)
![]() =0,7% [дБ](задаюсь)
=0,7% [дБ](задаюсь)
Переведём данную погрешность в дБ. Для этого введём весовой коэффициент К=0,7, тогда δГц =0,49% [Гц]
Состав базового ПО
Базовое ПО предназначено для реализации асинхронного протокола обмена, передачи команд, программных данных и результатов измерения и др.
Базовое ПО представленной системы должно содержать следующие модули:
1) Драйверы используемых устройств – это модуль, являющийся «посредником» между системой и конкретным устройством.
Основные функции драйверов:
а) проверка возможности обмена данными;
б) обнаружение и коррекция ошибок при передаче;
в) конвертирование стандартных команд программирования приборов в
специфические команды конкретного прибора;
г) считывание, накопление и передача приходящей по шине информации.
2) Модуль инициализации и деинициализации содержит подпрограммы инициализации системы КОП, установки и снятия сигнала ДУ, передачи по шине КОП интерфейсной команды и др.
Основные функции:
а) проверка работоспособности;
б) осуществление перехода в дистанционный/местный режим управления;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.