 ;
;
![]() - угол трения ходового
винта.
- угол трения ходового
винта.
Далее по заданной скорости подачи VМАКС определяется скорость вращения ходового винта, с -1
 , где tВ= πdСРtgα - шаг ходового винта, мм.
, где tВ= πdСРtgα - шаг ходового винта, мм.
Задавшись значением номинальной скорости ωДН, двигателя, можно определить ориентировочное значение передаточного числа редуктора iР (которое в дальнейшем может уточняться)
iР = ωДН/ωХВ.
По полученным значениям MХВ, iР и принятым для расчетов КПД механических передач определяется момент двигателя
 , где
, где ![]() - КПД ходового винта.
- КПД ходового винта.
Электропривод выполняется по системе тиристорный преобразователь двигатель - постоянного тока. Регулирование скорости однозонное. Тиристорный преобразователь в цепи якоря должен быть реверсивным. Целесообразно использование схем с раздельным управлением вентильными комплектами, не содержащих в силовой цепи уравнительных реакторов. Преобразователь в якорной цепи должен иметь возможность кратковременной (в течение 3 сек) работы с двухкратным номинальным током.
Наиболее целесообразно выбирать двигатель на
номинальное напряжение якорной обмотки 440 В. В данном случае при питании электропривода
от сети переменного тока напряжением 380 В можно использовать
бестрансформаторный трехфазный мостовой выпрямитель в цепи якоря.
При использовании бестрансформаторных схем выпрямления преобразователь должен подключаться к сети через токоограничивающие реакторы. Требуемое значение индуктивности этого реактора приближенно находится из следующих соображений: при номинальном токе через реактор, соответствующем номинальному выпрямленному току на выходе выпрямителя, на индуктивном сопротивлении реактора должно падать примерно 5% от номинального действующего фазного напряжения питающей сети.
Общая индуктивность цепи тока якоря должна быть достаточной для ограничения амплитуды его пульсаций на уровне не более 5% от номинального тока якоря двигателя. При недостаточном значении суммарной индуктивности якоря двигателя и силовых цепей преобразователя потребуется включение в якорную цепь сглаживающего дросселя.
Электропривод выполняется по двухконтурной структуре подчиненного регулирования: внутренний контур – контур регулирования тока якоря, внешний контур – контур регулирования скорости двигателя.
Расчет мощности и выбор двигателя, расчет параметров основных силовых элементов и регуляторов рассмотрен в /2, 3, 4, 5, 10, 13,/.
Графики переходных процессов рассчитываются с использованием программы структурного моделирования PSM. Необходимо рассчитать графики переходных процессов пуска при ступенчатом задании на скорость в 25% и 75% от номинальной, при наличии токоограничения и при моменте нагрузки на валу двигателя, соответствующем одному из расчетных режимов. Строятся зависимости от времени скорости двигателя и тока якоря.
Задание 4
Автоматическая система регулирования скорости реверсивного электропривода подачи координатно-расточного станка.
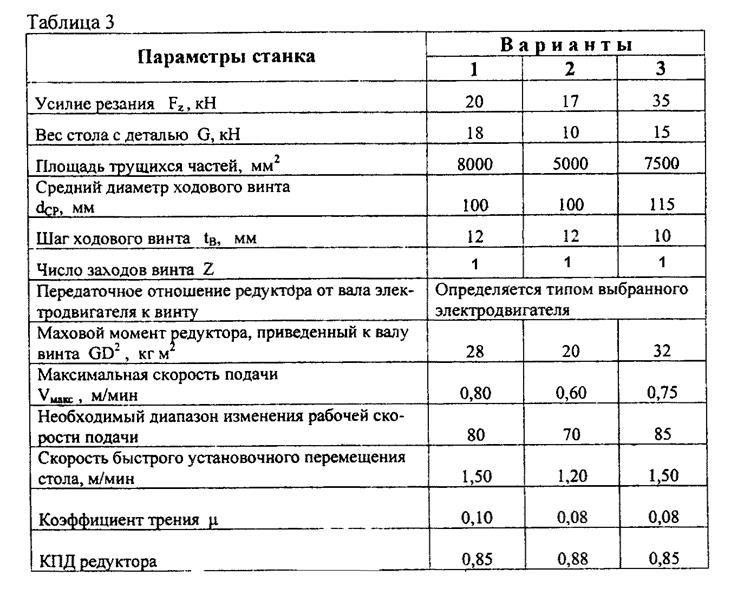
Данные для расчета приведены в таблице 4.
Методические указания
Расчет мощности и выбор двигателя, расчет параметров силовых элементов и расчет регуляторов производится в соответствии с методическими указаниями к заданию 3, однако в результирующем усилии FП должна быть учтена составляющая от прилипания трущихся поверхностей направляющих при трогании механизма, равная βS.
Графики переходных процессов рассчитываются с использованием программы структурного моделирования PSM. Необходимо рассчитать графики переходных процессов пуска при ступенчатом задании на скорость в 20% и 80% от номинальной, при наличии токоограничения и при моменте нагрузки на валу двигателя, соответствующем одному из расчетных режимов. Строятся зависимости от времени скорости двигателя и тока якоря.
Задание 5
Автоматическая система двухзонного регулирования скорости реверсивного электропривода главного движения токарного станка
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.