Система двухзонного регулирования скорости двигателя постоянного тока выполняется по структуре подчиненного регулирования и содержит следующие контура: контур регулирования тока якоря; контур регулирования скорости; контур регулирования тока возбуждения; контур регулирования ЭДС двигателя.
Расчет параметров трансформаторно-реакторного оборудования дан в /7, 12/, структурная схема системы двухзонного регулирования скорости и расчет параметров ее передаточных функций дан /13/. Техническая реализация систем двухзонного регулирования скорости рассмотрена в /14/.
Графики переходных процессов рассчитываются с использованием программы структурного моделирования PSM. Необходимо рассчитать графики переходных процессов пуска при ступенчатом задании на скорость в 75% и 120% от номинальной, при наличии токоограничения и при моменте нагрузки на валу двигателя, соответствующем одному из расчетных режимов. Строятся зависимости от времени скорости двигателя, тока якоря и тока обмотки возбуждения.
Задание 2
Автоматическая система регулирования скорости реверсивного
электропривода главного движения строгального станка
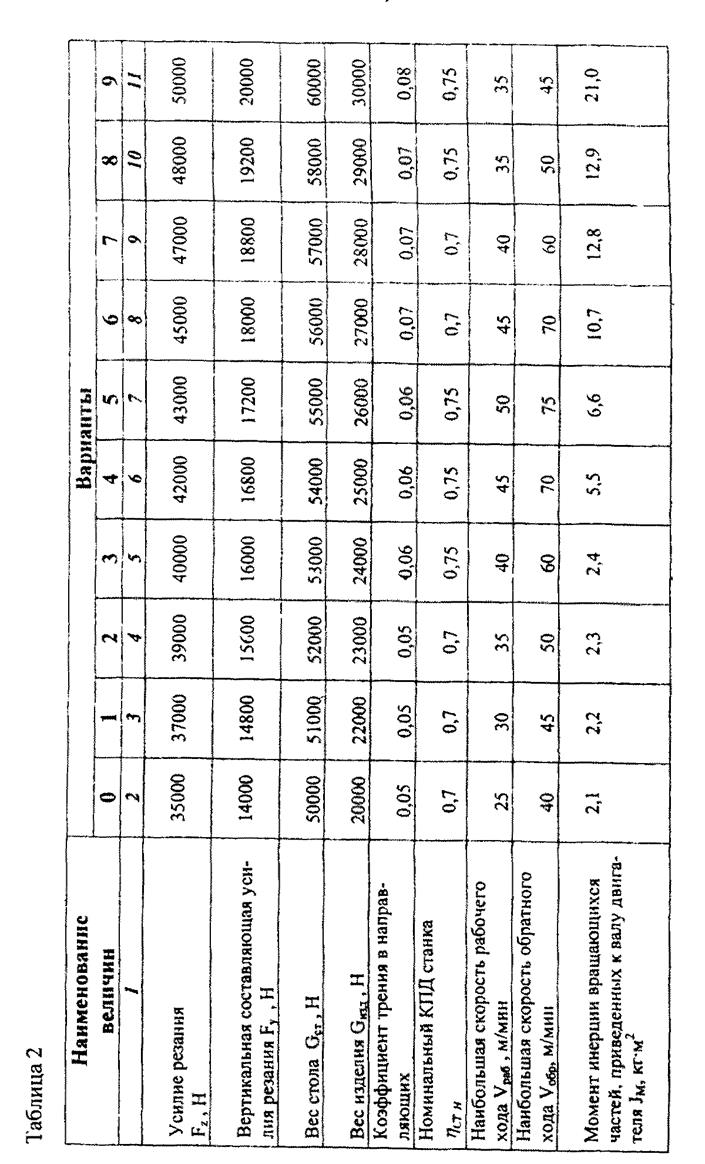
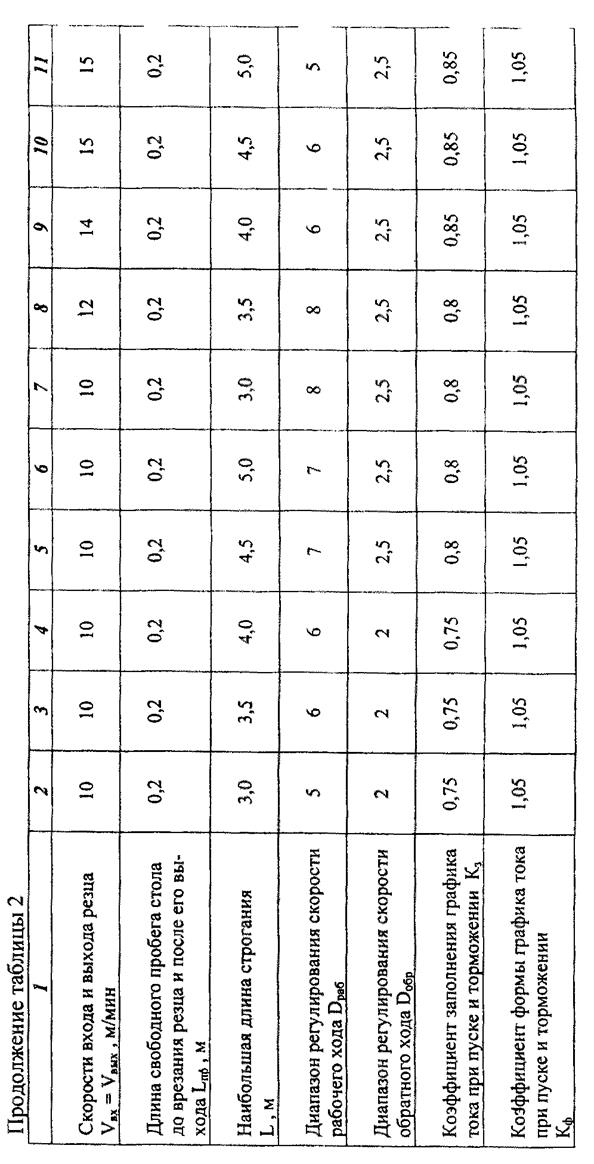
Исходные данные для расчетов представлены в таблице 2, электроприводы таких станков рассмотрены в /1,5/.
Методические указания
Расчет мощности на валу двигателя в кВт производится по максимальному усилию резания и максимальной скорости стола, ему соответствующей
 ,
,
где Fт = Fz + (Gст + Gизд + FУ)μ – тяговое усилие, Н; μ - коэффициент трения в направляющих.
Затем определяется расчетная мощность двигателя
 .
.
Задаваясь по кинематической схеме передаточным отношением двигателя к рейке стола ρ,, определяем предполагаемую частоту вращения двигателя (об/мин)
Предполагаемая скорость вращения двигателя, об/мин
n=ρVСТ,
где VСТ - линейная скорость движения стола, равная скорости прямого хода, м/мин; ρ - передаточное отношение от двигателя к рейке стола; определяется по кинематической схеме станка. Если ρ неизвестно, то его можно определить по приведенной выше формуле, задавшись предполагаемой скоростью вращения n, равной номинальной скорости выбираемого двигателя.
На основании значения РРАСЧ подбираем по каталогу двигатель ближайшей большей мощности с номинальной скоростью, отвечающей выбранному передаточному отношению.
Далее строится нагрузочная диаграмма и выбранный двигатель проверяется по перегреву и перегрузке. Для расчета нагрузочной диаграммы используются нижеследующие формулы /2, 5/.
Потери на трение стола о направляющие при холостом ходе стола,
 .
.
Потери в передачах при прямом ходе вхолостую
![]()
![]() .
.
Мощность на валу двигателя при прямом ходе вхолостую
![]() .
.
Электромагнитный момент двигателя при прямом ходе и полной нагрузке, Нм
 , где M0
- момент потерь холостого хода двигателя,
Нм; ωРАБ - угловая скорость двигателя при скорости стола VРАБ.
, где M0
- момент потерь холостого хода двигателя,
Нм; ωРАБ - угловая скорость двигателя при скорости стола VРАБ.
![]()
 , где
, где  или
или  - коэффициент пропорциональности между
моментом и током при номинальном потоке возбуждения двигателя;
- коэффициент пропорциональности между
моментом и током при номинальном потоке возбуждения двигателя;
MН, IН, UН, ωН - номинальные момент, ток, напряжение, скорость вращения двигателя; RЯ- активное сопротивление цепи якоря двигателя.
Мощность на валу двигателя при обратном ходе стола
 .
.
Электромагнитный момент двигателя при обратном ходе, Нм
 ,
,
где ωОБР - угловая скорость двигателя при скорости стола VОБР.
Необходимо использовать электропривод по системе тиристорный преобразователь – двигатель постоянного тока с двухзонным регулированием скорости. Работа привода во второй зоне будет при обратном ходе стола. Электропривод реверсивный; реверс производится изменением направления тока якоря.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.