







Российский государственный профессионально-педагогический университет
Институт электроэнергетики и информатики
Кафедра микропроцессорной управляющей вычислительной техники
Лабораторная работа №6
«Исследование нелинейной системы двухпозиционного регулирования»
Выполнили: студенты группы ВТ-311с
Сосинович А А
Проверил: Окунев Евгений Александрович
Екатеринбург 2010
Цель работы: исследование влияния изменения параметров ОУ на показатели качества регулирования; овладеть методикой определения показателей качества регулирования в нелинейных системах.
Общие сведения.
В отличие от линейных систем регулирования (П,ПИ,ПИД) в линейных системах постоянно наблюдается переходный процесс. Он носит автоколебательный характер, с устойчивыми амплитудами колебаний.
Показателями качества регулирования являются:
Амплитуда автоколебаний – Ах;
Период – Тх, Тх = (Т2-Т1)*2;
Статическая
ошибка регулирования - ![]() Хст.
Хст.
Результаты работы:
Переходный процесс в системе регулирования с исходными значениями параметров ОУ.
Коу = 130;
Тоу = 1,4;
![]() оу = 0,2.
оу = 0,2.
Результаты эксперимента
Кр = 0,0878.
|
Т |
0 |
99,5711 |
-1,8929 |
108,9267 |
-1,6026 |
99,0405 |
16,9980 |
73,3613 |
47,5093 |
40,6786 |
79,5205 |
0 |
|
Х(Т) |
0 |
1,19 |
2,38 |
3,57 |
4,76 |
5,95 |
7,14 |
8,33 |
9,52 |
10,71 |
11,9 |
13,09 |
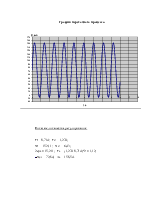
График переходного процесса.
Показатели качества регулирования:
Т1 = 0,476; Т2 = 0,868;
Х1 = 108,98; Х2 = -4,33;
2eps = 10,898; Тх = (Т2-Т1)*2=(0,868 -0,476)*2 = 0,784;
![]() Хст = 52,325; Ах
= 113,31.
Хст = 52,325; Ах
= 113,31.
Переходный процесс в системе регулирования с изменённым коэффициентом передачи ОУ.
Коу = 135;
Тоу = 1,4;
![]() оу = 0,2.
оу = 0,2.
Результаты эксперимента
Кр = 0,08458.
|
Т |
0 |
1,19 |
2,38 |
3,57 |
4,76 |
5,95 |
7,14 |
8,33 |
9,52 |
10,71 |
11,9 |
13,09 |
|
Х(Т) |
0 |
103,4689 |
-2,1686 |
113,3484 |
-1,948 |
103,0407 |
17,5528 |
76,0459 |
49,6857 |
41,5821 |
83,4671 |
0 |
График переходного процесса.
Показатели качества регулирования:
Т1 =0,476; Т2 = 0,868;
Х1 = 113,17,49; Х2 = -4,55;
2eps = 11,317; Тх = (0,868-0,476)*2 = 0,784;
![]() Хст = 54,31; Ах
= 117,72.
Хст = 54,31; Ах
= 117,72.
Переходный процесс в системе регулирования с изменением постоянной времени Тоу.
Коу = 130;
Тоу = 1,5;
![]() оу = 0,2.
оу = 0,2.
Результаты эксперимента
Кр = 0,09395.
|
Т |
0 |
1,185 |
2,370 |
3,555 |
4,740 |
5,925 |
7,110 |
8,295 |
9,480 |
10,665 |
11,850 |
13,035 |
|
Х(Т) |
0 |
92,5272 |
-0,3977 |
102,0481 |
-3,7466 |
99,0253 |
5,4655 |
84,1791 |
25,0513 |
61,0337 |
50,3621 |
41,4621 |
График переходного процесса.
Показатели качества регулирования:
Т1 =0,48; Т2 = 0,855;
Х1 = 102,32; Х2 = -4,06;
2eps = 10,232; Тх = (0,855-0,48)*2 = 0,75;
![]() Хст = 49,13; Ах
= 106,38.
Хст = 49,13; Ах
= 106,38.
Переходный процесс в системе
регулирования с изменением ![]() оу.
оу.
Коу = 130;
Тоу = 1,4;
τоу = 0,3.
Результаты эксперимента
Кр = 0,0609.
|
Т |
0 |
1,19 |
2,38 |
3,57 |
4,76 |
5,95 |
7,14 |
8,33 |
9,52 |
10,71 |
11,9 |
13,09 |
|
Х(Т) |
0 |
4,4912 |
-6,0187 |
-2,308 |
14,9355 |
42,6142 |
75,7517 |
108,3877 |
134,6497 |
149,81 |
151,1366 |
0,000 |
График переходного процесса.
Показатели качества регулирования:
Т1 =0,714; Т2 = 1,274;
Х1 = 152,11; Х2 = -6,43;
2eps = 15,211; Тх = (1,274-0,714)*2 = 1,12;
![]() Хст = 72,84; Ах
= 158,54.
Хст = 72,84; Ах
= 158,54.
График переходных процессов в системе двухпозиционного регулирования с изменяемыми параметрами.
Вывод:
При увеличении Kоу возрастает амплитуда колебаний при неизменной частоте.
При изменении Tоу – амплитуда колебаний уменьшается, а частота незначительно смещается в сторону увеличения.
При изменении τоу – амплитуда резко увеличивается и увеличивается период колебаний.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.