Параметрическая оптимизация системы автоматического регулирования.
Цель работы: для заданных исходных условий выбрать оптимальный закон регулирования и определить оптимальные настройки регулятора.
Общие сведения: оптимальный законом регулирования является наиболее простой, обеспечивающий требуемое качество регулирования. Наиболее простые П и И –законы. Самый сложный – ПИД закон.
Используя математическую модель системы регулирования и ПК, строится график переходного процесса и по нему определяются показатели качества регулирования. Если ни один из показателей качества регулирования не выходит за предельно допустимые значения, оговоренных в исходных данных, то регулятор может считаться оптимальным.
Далее система регулирования с этим регулятором проверяется на запасы устойчивости по модулю и фазе. И если показатели качества и запасоустойчивость удается ‘вогнать’ в заданные допуски, параметрическая оптимизация считается законченной. В процессе работы приходится многократно повторять эксперимент, задавая различные законы регулирования, варьируя параметрами настройки регулятора.
Исходные данные:
|
Параметры ОУ |
Пред. доп. знач-я показ-ей кач-ва регул-ия |
Внешн. возм-я |
|||||
|
Kоу |
Тоу |
ζоу |
X1 |
∆Xст |
tр |
η |
∆Z |
|
12 |
30 |
20 |
60 |
25 |
200 |
0 |
6 |
Результаты работы:
- ПИ-регулятор:
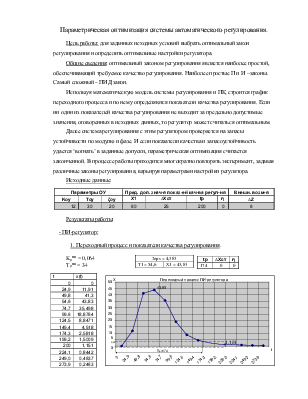
1. Переходный процесс и показатели качества регулирования.
|
2eps = 4,383 |
|
|
T1 = 54,6 |
X1 = 43,83 |
|
tр |
∆Xст |
η |
|
174 |
0 |
0 |
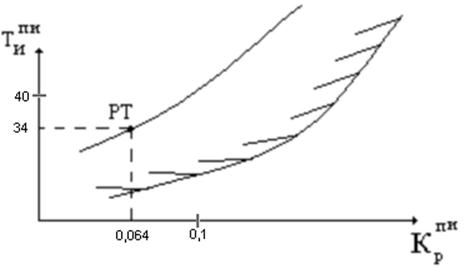
Kрпи = 0,064
Tрпи = 34
|
t |
x(t) |
|
0 |
0 |
|
24,9 |
11,91 |
|
49,8 |
41,3 |
|
54,6 |
43,83 |
|
74,7 |
35,498 |
|
99,6 |
18,8764 |
|
124,5 |
8,8471 |
|
149,4 |
4,518 |
|
174,3 |
2,5818 |
|
199,2 |
1,5009 |
|
200 |
1,151 |
|
224,1 |
0,8442 |
|
249,0 |
0,4637 |
|
273,9 |
0,2463 |
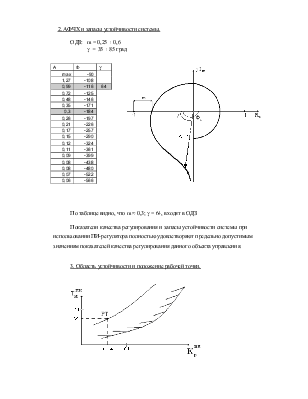
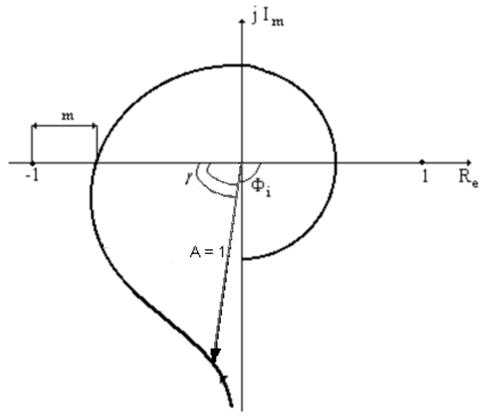
2. АФЧХ и запасы устойчивости системы.
ОДЗ: m = 0,25 ÷ 0,6
γ = 35 ÷ 85 град
|
А |
Ф |
γ |
|
max |
-90 |
|
|
1,27 |
-108 |
|
|
0,99 |
-116 |
64 |
|
0,72 |
-125 |
|
|
0,48 |
-146 |
|
|
0,35 |
-171 |
|
|
0,3 |
-184 |
|
|
0,26 |
-197 |
|
|
0,21 |
-226 |
|
|
0,17 |
-257 |
|
|
0,15 |
-290 |
|
|
0,12 |
-324 |
|
|
0,11 |
-361 |
|
|
0,09 |
-399 |
|
|
0,08 |
-438 |
|
|
0,08 |
-480 |
|
|
0,07 |
-522 |
|
|
0,06 |
-566 |
По таблице видно, что m ≈ 0,3; γ = 64, входят в ОДЗ
Показатели качества регулирования и запасы устойчивости системы при использовании ПИ-регулятора полностью удовлетворяют предельно допустимым значениям показателей качества регулирования данного объекта управления.
3. Область устойчивости и положение рабочей точки.
- И-регулятор:
|
Kри |
X1 |
X2 |
tр |
|
107 |
59,55 |
- 0,074 |
330 |
|
110 |
59,69 |
- |
330 |
|
116 |
59,96 |
- |
350 |
|
117 |
60,01 |
- |
400 |
Показатели качества регулирования И-регулятора не удовлетворяют предельно допустимым значениям показателей качества регулирования данного объекта управления. Т.к. при увеличении Kри, значение X1 выходит за допустимое значение X1доп. А при уменьшении Kри, значение tр выходит за допустимое значение tрдоп. При дальнейшем уменьшении Kри появляется перерегулирование.
- П-регулятор:
Показатели качества регулирования при использовании П-регулятора удовлетворяют предельно допустимым значениям показателей качества регулирования данного объекта управления. Но не удовлетворяют запасу устойчивости по модулю m и по фазе γ.
Вывод: таким образом, для заданных исходных условий оптимальным законом регулирования является ПИ-регулирование с параметрами настройки, которое обеспечивает показатели качества регулирования: Х1 = ; tp = ; ∆Xст = 0; η=0 и запасы устойчивости: m = 0,3; γ = 64o
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.