![]() . (3)
. (3)
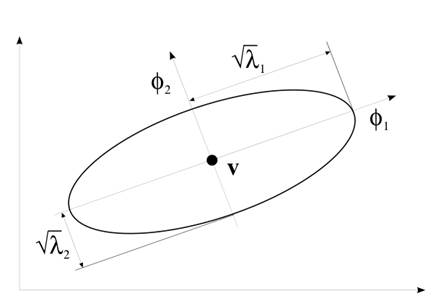
Рис. 1.
уравнение ![]() определяет
гиперэллипсоид.
определяет
гиперэллипсоид.
Длина оси гиперэллипсоид задается ![]() и его
направление, движется на
и его
направление, движется на ![]() , где
, где ![]() и
и ![]() это собственное
значение и соответствующий собственный вектор
это собственное
значение и соответствующий собственный вектор ![]() , соответственно.
, соответственно.
Простой способ избежать численных
проблем, ограничить соотношение между максимальным и минимальным собственным
значением так, чтобы значение было меньше заданного порога (в нашем примере, мы
использовали ![]() ). Когда этот порог превышен,
минимальное значение увеличивается таким образом, что отношение было равным
порогу и ковариационной матрицей восстановления:
). Когда этот порог превышен,
минимальное значение увеличивается таким образом, что отношение было равным
порогу и ковариационной матрицей восстановления:
![]()
где ![]() диагональная
матрица, содержащая собственные ограниченные и
диагональная
матрица, содержащая собственные ограниченные и ![]() является
матрица, столбцы которой являются соответствующие собственным векторам.
является
матрица, столбцы которой являются соответствующие собственным векторам.
На рисунке 2 показан пример набора данных, которые не могут быть объединены со стандартным алгоритмом GK, из-за численных проблем. Причина в том, что данные образцы в течение трех линейных сегментов полностью коррелируют. Используя описанную выше методику, численные проблемы можно избежать и улучшение алгоритм GK, находясь в предполагаемом разбиение на три линейных сегментов.
Основные направления кластеров идеально совпадают с данными. Эта модель затем объясняет 99,85% дисперсии в данных.
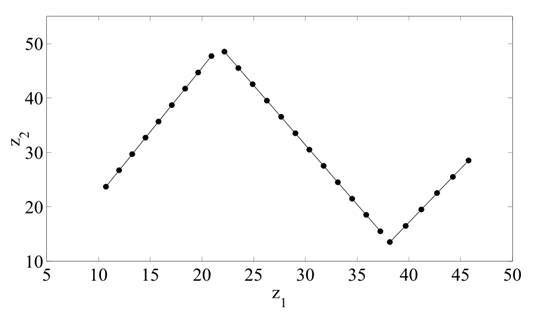
Рис. 2. Пример набора данных с линейными кластерами.
IV.
Проблема переобучения.
Выше модификации алгоритм GK предотвращает работу численных задач. Тем не менее, в результате можно получить кластеры, которые являются чрезвычайно длительны в направлении наибольших собственных значений и имеют мало отношения с реальным распределением данных. Это может привести к переобучения данных и, следовательно, получается плохая модель.
Эта проблема возникает, главным образом, когда количество данных точек в кластере становится слишком небольшой. В таком случае, вычисление ковариационной матрицы не является надежной оценкой исходного распределения данных. Одним из путей решения этой проблемы является ограничение соотношение между максимальными и минимальными собственным значением еще больше, чем описано в предыдущем разделе.
Это позволит предотвратить крайние удлинение кластеров. Другой способ заключается в добавлении масштабной единичной матрицы к ковариационной матрицы. Tadjudin [7] and Friedman [8] описывают несколько различных способов для улучшения оценки ковариации. Вдохновленный этими методами, мы предлагаем следующую оценку для алгоритма ГК:
![]() (4)
(4)
где ![]() является
параметром настройки и
является
параметром настройки и ![]() является
ковариационной матрицей всего набора данных. В зависимости от значения
является
ковариационной матрицей всего набора данных. В зависимости от значения ![]() кластеры
вынуждены иметь более или менее одинаковую форму.
кластеры
вынуждены иметь более или менее одинаковую форму.
Где ![]() является
1, все ковариационные матрицы равны и имеют тот же размер, что, конечно,
ограничивает возможности алгоритма для правильной идентификации кластеров.
является
1, все ковариационные матрицы равны и имеют тот же размер, что, конечно,
ограничивает возможности алгоритма для правильной идентификации кластеров.
Как
![]() основан на весь набор данных, его значение не
зависит от количества кластеров. Объемы
основан на весь набор данных, его значение не
зависит от количества кластеров. Объемы ![]() , однако,
снижаются по мере возрастания количества кластеров. Это означает, что
увеличение количества кластеров делает кластеров круглее. Этот термин,
, однако,
снижаются по мере возрастания количества кластеров. Это означает, что
увеличение количества кластеров делает кластеров круглее. Этот термин, ![]() понижает настройка усилия. Формула вес с включенным
объем от общего набора данных. Небольшие недостатки этого метода является дополнительным
параметром настройки
понижает настройка усилия. Формула вес с включенным
объем от общего набора данных. Небольшие недостатки этого метода является дополнительным
параметром настройки ![]() . Однако, при использовании
алгоритма GK для извлечения нечетких моделей от автономных данных, как правило,
не проблема, чтобы включить дополнительный параметр и настроить его в
перекрестной проверке работы. Кроме того, ожидается, что выполнение алгоритма
кластеризации уменьшается, когда имеется достаточно данных обучения для
построения ковариационной матрицы.
. Однако, при использовании
алгоритма GK для извлечения нечетких моделей от автономных данных, как правило,
не проблема, чтобы включить дополнительный параметр и настроить его в
перекрестной проверке работы. Кроме того, ожидается, что выполнение алгоритма
кластеризации уменьшается, когда имеется достаточно данных обучения для
построения ковариационной матрицы.
V.
Модификация алгоритма GK.
Полный алгоритм GK, в том числе двух указанных модификаций приведен ниже.
Учитывая набор данных ![]() , выбирают стандартные параметры
, выбирают стандартные параметры ![]() ,
,
![]() ,
, ![]() ,
,
![]() , пороговое условие номера
, пороговое условие номера ![]() и
весовые параметры
и
весовые параметры ![]() . Инициализация раздела матрицы и
вычисления ковариационной матрицы всего набора данных.
. Инициализация раздела матрицы и
вычисления ковариационной матрицы всего набора данных.
Повторите
эти действия для ![]()
Шаг 1: Средства вычисления кластера:

Шаг 2: Вычислить ковариационные матрицы кластера:

![]()
Добавить масштабирование единичной матрицы:
![]()
Извлечение собственных ![]() и собственные векторы
и собственные векторы ![]() для
для ![]() .
.
Находим ![]() и набор:
и набор:
![]()
![]() для
которых
для
которых ![]()
Реконструкция
![]() по
по
![]()
Шаг 3: Вычислить расстояния:

![]()
![]()
Шаг 4: Обновление раздела матрицы:
для ![]()
если ![]() для
для ![]() ,
,
иначе
![]() для
для ![]() и
и ![]()
вместе с ![]() иначе.
иначе.
до тех пор пока ![]() .
.
В двойной точности с плавающей точкой
реализации (например, в MATLAB), пороговое условие числа, как правило, быть
установлены в большом количестве, например, ![]() .
.
Установка весового параметра ![]() зависит
от приложения и некоторые эксперименты могут быть необходимы, чтобы найти
правильное значение. MATLAB код алгоритма приведен в
Приложении.
зависит
от приложения и некоторые эксперименты могут быть необходимы, чтобы найти
правильное значение. MATLAB код алгоритма приведен в
Приложении.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.