|
|
1 |
0.5 |
0.5 |
0.5 |
0.5 |
1 |
0.5 |
0.5 |
|
|
1 |
1 |
1 |
3 |
5 |
1 |
5 |
5 |
|
|
1 |
1 |
1 |
1 |
1 |
1 |
0.5 |
2 |
|
|
1 |
1 |
2 |
2 |
3 |
3 |
3 |
3 |
|
|
1.97 |
1.24 |
1.3 |
1.25 |
1.43 |
1.4 |
1.23 |
1.14 |
|
|
-0.62 |
-0.55 |
-0.34 |
-0.48 |
-0.4 |
-0.26 |
-0.38 |
-0.414 |
|
|
-4.94 |
-5.51 |
-11.1 |
-5.92 |
-7.13 |
-15.8 |
-7.71 |
-6.94 |
|
|
-0.58 |
-0.41 |
-0.21 |
-0.21 |
-0.14 |
-0.19 |
-0.1 |
-0.157 |
Из всех приведённых вариантов выбираем последний, т.к. при данных
значениях элементов матриц Q и R
время регулирования ![]() минимально и остальные
параметры переходных процессов удовлетворяют требованиям. Переходные процессы
для выходного вектора
минимально и остальные
параметры переходных процессов удовлетворяют требованиям. Переходные процессы
для выходного вектора ![]() представлены на рисунке 1.
представлены на рисунке 1.
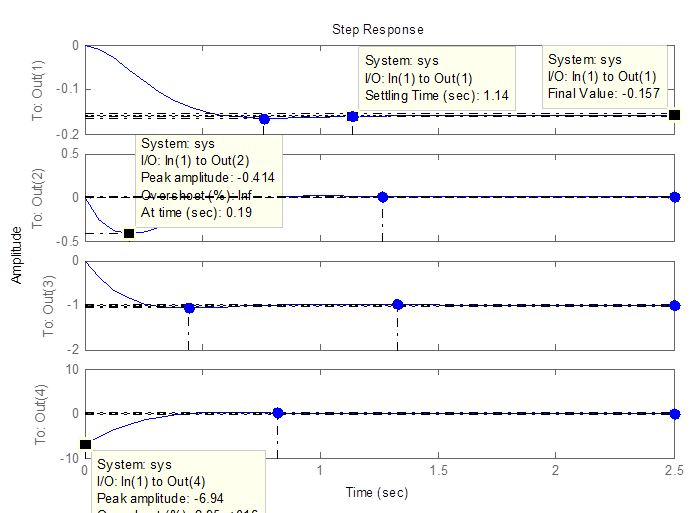
Рисунок 3. Переходные процессы для выходного вектора ![]() .
.
СИНТЕЗ ФИЛЬТРА КАЛМАНА ДЛЯ СИСТЕМЫ СТАБИЛИЗАЦИИ ТАНГАЖА.
1. Постановка задачи.
Для реализации оптимального закона управления руля высоты
![]()
необходимо непрерывно измерять все компоненты вектора
состояния ![]() ,
,![]() и
и ![]() . Для измерения
. Для измерения ![]() и
и ![]() используют
гироскопические приборы, а измерение угла наклона траектории
используют
гироскопические приборы, а измерение угла наклона траектории ![]() представляет известные трудности. .
Поставим задачу в двух вариантах:
представляет известные трудности. .
Поставим задачу в двух вариантах:
-по измерению ![]() ;
;
-по измерению ![]() и
и ![]() .
.
Необходимо восстановить весь вектор состояния.
Такая задача в любой из приведенных постановок может быть решена использованием алгоритма фильтра Калмана (ФК). В достаточно общей постановке задача синтеза ФК формулируется следующим образом.
Для данных уравнений объекта, возбуждаемого белым шумом ![]()
![]()
и уравнений измерений, содержащих аддитивную ошибку типа
белого шума ![]()
![]() ,
,
где ![]() ,
, ![]() ;
;
 ,
,  .
.
Здесь M – математическое ожидание.
Получить оценку ![]() вектора состояния
вектора состояния
![]() , минимизирующую ошибку
, минимизирующую ошибку
![]() .
.
Приведем математическую модель летательного аппарата (ЛА) и измерений к требуемому виду. Для этого необходимо учесть случайные возмущения, действующие на ЛА и ошибки измерителей.
2. Математическая модель объекта управления.
Уравнения ЛА при учете составляющей турбулентности нормальной к траектории имеют вид [Хованский Ю. М., Пономарев В.К. Стабилизация летательных аппаратов , 1979].
![]() ;
;
![]()
или в векторной форме:
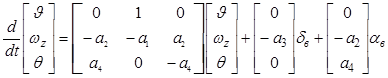 ,
,
где  ;
; ![]() - нормальная к траектории
турбулентность атмосферы.
- нормальная к траектории
турбулентность атмосферы.
Обычно турбулентность атмосферы моделируют с помощью формирующих фильтров первого порядка:
![]() .
.
где  , L –масштаб турбулентности (
, L –масштаб турбулентности (![]() );
);
![]() -среднеквадратическое
значение скорости ветра (
-среднеквадратическое
значение скорости ветра (![]() для средней
турбулентности).
для средней
турбулентности).
Для формирующего фильтра первого порядка корреляционная функция имеет вид:
![]() ,
,
а спектральная плотность:
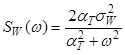 .
.
Вернемся к уравнениям ЛА в векторной форме. Вектор случайных внешних воздействий можно записать следующим образом:
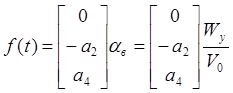 .
.
Матрицу корреляционных функций для этого вектора при замене ![]() эквивалентным белым шумом как
показано выше получим так
эквивалентным белым шумом как
показано выше получим так
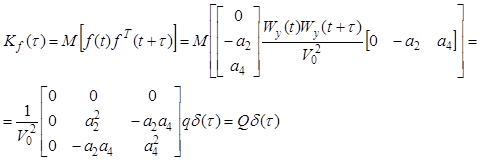
Здесь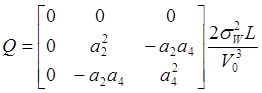 .
.
3. Математическая модель измерителей.
Пусть измеряются ![]() и
и ![]() ,
тогда матрица
,
тогда матрица 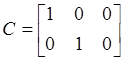 , а вектор
, а вектор  ;
;
![]() и
и ![]() -широкополосные
случайные ошибки соответствующих гироскопических измерителей, моделируемые, как
правило, уравнениями первого порядка. Корреляционные функции эквивалентных
белых шумов
-широкополосные
случайные ошибки соответствующих гироскопических измерителей, моделируемые, как
правило, уравнениями первого порядка. Корреляционные функции эквивалентных
белых шумов ![]() ,
,  ,
где
,
где  -среднеквадратическая ошибка и
постоянная, обратная постоянной времени фильтра прибора (
-среднеквадратическая ошибка и
постоянная, обратная постоянной времени фильтра прибора (![]() ).
). ![]() ,
,
![]() .
.
Корреляционная функция ошибок измерителей в этом случае имеет вид:
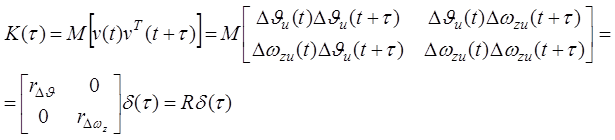
Здесь обозначено
 ;
;  ;
;  ;
;
4.
Если измеряется только ![]() , то
, то ![]() ,
, ![]() ,
, ![]() .
.
5. Уравнения фильтра Калмана.
Уравнение фильтра Калмана для установившегося состояния имеют вид:
![]() , где матрица коэффициентов
передачи
, где матрица коэффициентов
передачи ![]() ,а Р является единственным
положительно-определенным решением алгебраического уравнения Риккати:
,а Р является единственным
положительно-определенным решением алгебраического уравнения Риккати:
![]() .
.
Матрица Р это матрица ковариаций ошибки оценки вектора состояния, т.е.
![]() при
при ![]()
Диагональные элементы этой матрицы являются дисперсиями ошибок оценок соответствующих компонент вектора состояния и служат для определения точности оценок в установившемся состоянии.
6. Расчет фильтра Калмана на ЭВМ
Ввод матриц объекта управления для расчета фильтра Калмана:
an=a; bn=[0; -a2; a4]; cn= c; dn=d;
Ввод интенсивностей шумов
qn = [2*sigmaW*sigmaW*L/V0^3]
rn11 = [2*sigmateta*sigmateta*Tf];
rn22 = [2*sigmaomega*sigmaomega*Tf];
Формирование матрицы интенсивностей ошибок измерителей
rn = [rn11 0; 0 rn22]
Формирование объекта для синтеза ФК
sysn = ss(an,bn,cn,dn)
Расчет ФК
[kest, L, P] = kalman(sysn,qn,rn)
Результатом выполнения команды kalman являются 3 объекта: kest, L, P. Первый объект kest содержит информацию о фильтре Калмана в виде
![]()
![]() ,
,
Второй и третий объекты это матрица коэффициентов передачи ФК L и матрица ковариаций ошибки оценки вектора состояния P:
L =
0.7569 0.3465
0.3465 2.4470
0.5200 0.0186
P =
0.0015 0.0007 0.0010
0.0007 0.0049 0.0000
0.0010 0.0000 0.0009
Диагональные элементы матрицы Р являются дисперсиями ошибок оценок соответствующих компонент вектора состояния и служат для определения точности оценок в установившемся режиме:
![]() ,
,  ,
,
![]() .
.
Можно также определить  ,
так как
,
так как  , то, зная
, то, зная ![]() ,
находим:
,
находим:

Вычисление собственных чисел (корней характеристического уравнения ФК)
eig(kest)=
-0.7009
-2.8815 + 0.9852i
-2.8815 - 0.9852i
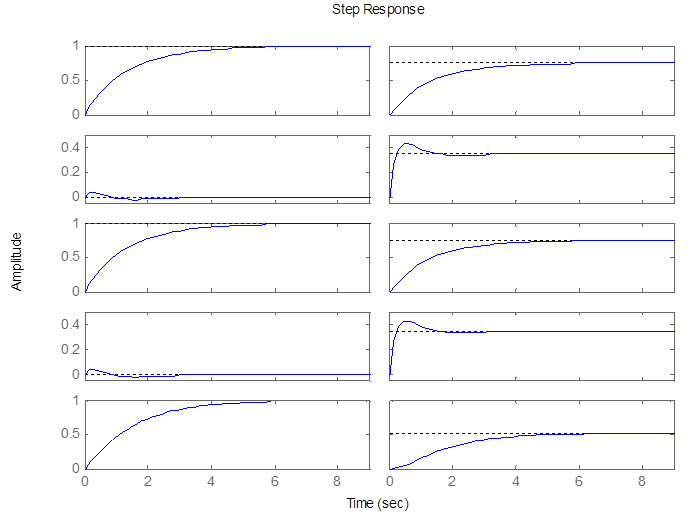
Анализ процессов и построение частотных характеристик ФК. С
помощью команды ltiview(kest) построим переходные характеристики (Рисунок 4).
По полученным характеристикам определяем время готовности ФК, оно равно ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рисунок 4. Временные характеристики ФК.
На рисунке 5 показаны реальные
значения угла тангажа (штриховая линия) и получившаяся с помощью ФК его оценка.
Из графика можно определить, что максимальное отклонение оценки от реального
значения не превышает 0.007 град, это отклонение попадает в полосу шириной ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.