


Лекция 13
7. Регулирование скорости движения ЭПС постоянного тока.
Как следует из уравнения, описывающего установившийся режим для двигателя постоянного тока
 ,
,
регулирование скорости его вращения возможно следующими способами:
- изменением подводимого напряжения;
- изменением величины сопротивления цепи ТД;
- изменением магнитного потока, т.е. тока возбуждения ТД.
На существующем ЭПС постоянного тока применяются все перечисленные способы (на конкретном подвижном составе хотя бы один из них).
Изменение подводимого напряжения для ЭПС постоянного тока процесс достаточно трудоемкий. Поэтому этот способ осуществим с помощью перегруппировки ТД или применения импульсного регулятора напряжения. На данный момент не существует магистрального подвижного состава, использующего импульсное регулирование напряжения ТД. Поэтому более подробно следует остановиться на изменении напряжения на ТД посредством перегруппировки. Существует несколько способов перегруппировки ТД, применяемых на существующем подвижном составе:
- перегруппировка "мостом" – ЭР2, ЧС6, ЧС2Т (С–СП);
- перегруппировка шунтированием ТД – ЧС2Т (СП–П);
- вентильный переход – ВЛ10, ВЛ11.
К перегруппировке предъявляются следующие требования:
- минимальные изменения в силовой схеме;
- отсутствие значительных бросков силы тяги;
- отсутствие значительных провалов силы тяги.
7.1. Реостатный пуск.
Изменение величины сопротивления в цепи ТД является разновидностью изменения напряжения, подводимого к ТД, т.к., вследствие падения части напряжения на дополнительном резисторе, вызывает уменьшение величины напряжения, подводимого к ТД. Необходимость включения дополнительного резистора в цепь ТД при пуске вызвана, во-первых, необходимостью ограничения тока ТД при пуске (при прямом включении он может достигать нескольких тысяч ампер. При этом возможно повреждение электрического оборудования или срыв сцепления), и, во-вторых, условиями комфортности пассажиров:
Imax £ Iд max (нагрев или коммутация);
Imax £ Iсц max (Fсц);
Imax £ Iк max (пусковое ускорение).
Ток, потребляемый ТД из сети
 .
.
При разгоне желательно иметь постоянную силу тяги (постоянное ускорение), следовательно, постоянный или слегка увеличивающийся ток для компенсации силы основного сопротивления движению. Из формулы следует, что для поддержания постоянного тока ТД при увеличении скорости следует линейно уменьшать величину дополнительного сопротивления цепи ТД:
 .
.
Предположим, что у нас имеется система плавного регулирования сопротивления. В этом случае величина максимального пускового сопротивления
 .
.
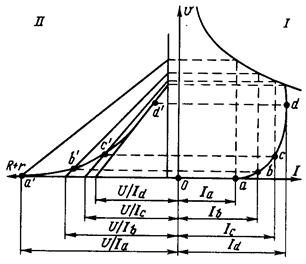
Зависимость дополнительного
сопротивления от скорости можно определить графически. Для этого в I квадранте строится скоростная характеристика ТД и находится
проекция тока Iп на ось скорости. Во втором
квадранте по горизонтальной оси откладывается величина ![]() .
Через полученные две точки проводится прямая, которая и будет представлять
собой графическое изображение зависимости пускового сопротивления от скорости,
т.к. ввиду малости величины сопротивления ТД им можно пренебречь.
.
Через полученные две точки проводится прямая, которая и будет представлять
собой графическое изображение зависимости пускового сопротивления от скорости,
т.к. ввиду малости величины сопротивления ТД им можно пренебречь.
 Преимуществом системы
плавного регулирования пускового сопротивления является возможность реализации
нелинейного закона регулирования. Предположим нам необходимо реализовать изменение
силы тяги по ограничению по сцеплению. В этом случае по тяговой и электромеханической
характеристике следует найти скорости и токи, соответствующие ограничению по
сцеплению. На скоростной характеристике в первом квадранте отложить величины
найденных скоростей и токов, а во втором квадранте – величины
Преимуществом системы
плавного регулирования пускового сопротивления является возможность реализации
нелинейного закона регулирования. Предположим нам необходимо реализовать изменение
силы тяги по ограничению по сцеплению. В этом случае по тяговой и электромеханической
характеристике следует найти скорости и токи, соответствующие ограничению по
сцеплению. На скоростной характеристике в первом квадранте отложить величины
найденных скоростей и токов, а во втором квадранте – величины ![]() . Соединив во втором квадранте
полученные точки, мы найдем графическое изображение закона регулирования
пускового сопротивления.
. Соединив во втором квадранте
полученные точки, мы найдем графическое изображение закона регулирования
пускового сопротивления.
На существующем подвижном составе плавный реостатный пуск применяется лишь на электропоезде ЭР200 и подвижном составе городского электротранспорта. На остальном подвижном составе используется ступенчатый реостатный пуск. Рассмотрим, каким образом можно определить величину ступеней пускового резистора.
Величину максимального пускового резистора при трогании с места выбирают так же, как и при плавном реостатном пуске – по величине максимального пускового тока. При ступенчатом выводе сопротивления неизбежны броски тока от Imin до Imax. Следовательно, актуален вопрос выбора величины Imin. С одной стороны, при пуске желательно иметь максимально возможное ускорение для уменьшения нагрузки тяговой сети и сокращения потерь электроэнергии при пуске. Пусковое ускорение характеризует средний пусковой ток
 .
.
Следовательно, для увеличения пускового ускорения следует иметь как можно большую величинуImin. С другой стороны чем меньше броски тока при пучке, тем меньше броски силы тяги – тем меньше вероятность срыва сцепления и комфортность пассажиров (т.к. комфортность зависит не только от величины ускорения, но и от скорости его изменения).
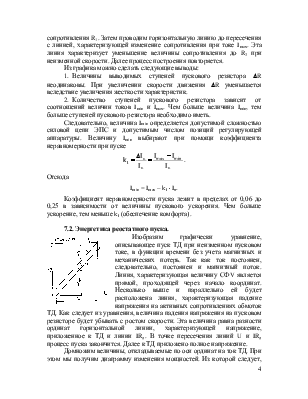
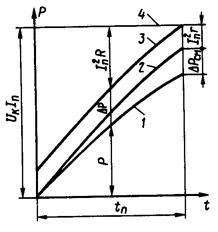
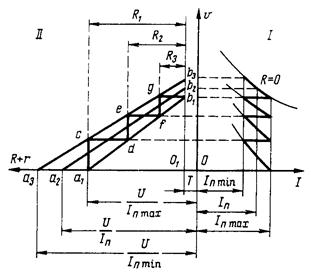 Графические построения
для определения ступеней пускового резистора выполняются аналогично построениям
при плавном регулировании пускового сопротивления, но для двух токов Imin и Imax.
Выберем произвольно величину Imin и сделаем
графические построения. Для определения ступеней пускового сопротивления
проведем вертикальную линию из точки с абсциссой
Графические построения
для определения ступеней пускового резистора выполняются аналогично построениям
при плавном регулировании пускового сопротивления, но для двух токов Imin и Imax.
Выберем произвольно величину Imin и сделаем
графические построения. Для определения ступеней пускового сопротивления
проведем вертикальную линию из точки с абсциссой  до
пересечения с линией, характеризующей изменение сопротивления при токе Imin. Эта линия характеризует изменение скорости
при неизменном значении сопротивления R1. Затем
проводим горизонтальную линию до пересечения с линией, характеризующей изменение
сопротивления при токе Imax. Эта линия
характеризует уменьшение величины сопротивления до R2
при неизменной скорости. Далее процесс построения повторяется.
до
пересечения с линией, характеризующей изменение сопротивления при токе Imin. Эта линия характеризует изменение скорости
при неизменном значении сопротивления R1. Затем
проводим горизонтальную линию до пересечения с линией, характеризующей изменение
сопротивления при токе Imax. Эта линия
характеризует уменьшение величины сопротивления до R2
при неизменной скорости. Далее процесс построения повторяется.
Из графика можно сделать следующие выводы:
1. Величины выводимых ступеней пускового резистора DR неодинаковы. При увеличении скорости движения DR уменьшается вследствие увеличения жесткости характеристик.
2. Количество ступеней пускового резистора зависит от соотношений величин токов Imin и Imax. Чем больше величина Imin, тем больше ступеней пускового резистора необходимо иметь.
Следовательно, величина Imin определяется допустимой сложностью силовой цепи ЭПС и допустимым числом позиций регулирующей аппаратуры. Величину Imin выбирают при помощи коэффициента неравномерности при пуске
 .
.
Отсюда
Imin = Imax – kI × Iп.
Коэффициент неравномерности пуска лежит в пределах от 0,06 до 0,25 в зависимости от величины пускового ускорения. Чем больше ускорение, тем меньше kI (обеспечение комфорта).
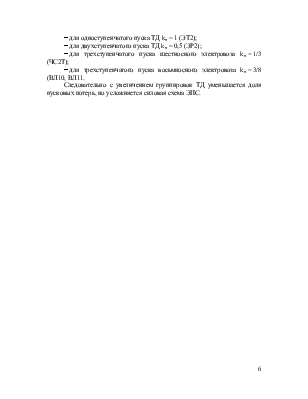
7.2. Энергетика реостатного пуска.
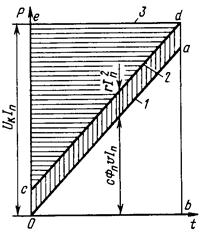
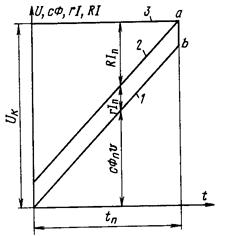 Изобразим графически
уравнение, описывающее пуск ТД при неизменном пусковом токе, в функции времени
без учета магнитных и механических потерь. Так как ток постоянен, следовательно,
постоянен и магнитный поток. Линия, характеризующая величину СФV является прямой, проходящей через начало координат.
Несколько выше и параллельно ей будет расположена линия, характеризующая
падение напряжения на активных сопротивлениях обмоток ТД. Как следует из уравнения,
величина падения напряжения на пусковом резисторе будет убывать с ростом
скорости. Эта величина равна разности ординат горизонтальной линии, характеризующей
напряжение, приложенное к ТД и линии IRд. В
точке пересечения линий U и IRд
процесс пуска закончится. Далее к ТД приложено полное напряжение.
Изобразим графически
уравнение, описывающее пуск ТД при неизменном пусковом токе, в функции времени
без учета магнитных и механических потерь. Так как ток постоянен, следовательно,
постоянен и магнитный поток. Линия, характеризующая величину СФV является прямой, проходящей через начало координат.
Несколько выше и параллельно ей будет расположена линия, характеризующая
падение напряжения на активных сопротивлениях обмоток ТД. Как следует из уравнения,
величина падения напряжения на пусковом резисторе будет убывать с ростом
скорости. Эта величина равна разности ординат горизонтальной линии, характеризующей
напряжение, приложенное к ТД и линии IRд. В
точке пересечения линий U и IRд
процесс пуска закончится. Далее к ТД приложено полное напряжение.
Домножим величины, откладываемые по оси ординат на ток ТД. При этом мы получим диаграмму изменения мощностей. Из которой следует, что при увеличении скорости мощность потерь на активных сопротивлениях обмоток ТД постоянна, а мощность потерь в пусковых сопротивлениях уменьшается. Так как энергия равна интегралу от мощности по времени, то площади, ограниченные соответствующими линиями характеризуют затраты энергии на нагревание воздуха (четырехугольник аоеd) и полезную работу (треугольник аоb).
 Действительная
диаграмма распределения мощностей несколько отличается от упрощенной, так как
следует учесть механические и магнитные потери (линия 1), а так же влияние
насыщения магнитной системы и увеличение сопротивление движению с ростом
скорости, вследствие чего линии, ограничивающие площадь, характеризующую потери
на активных сопротивлениях обмоток ТД будут несколько выпуклыми. Однако величина
механических и магнитных потерь, по сравнению с полезной работой, невелика и
ими можно пренебречь.
Действительная
диаграмма распределения мощностей несколько отличается от упрощенной, так как
следует учесть механические и магнитные потери (линия 1), а так же влияние
насыщения магнитной системы и увеличение сопротивление движению с ростом
скорости, вследствие чего линии, ограничивающие площадь, характеризующую потери
на активных сопротивлениях обмоток ТД будут несколько выпуклыми. Однако величина
механических и магнитных потерь, по сравнению с полезной работой, невелика и
ими можно пренебречь.
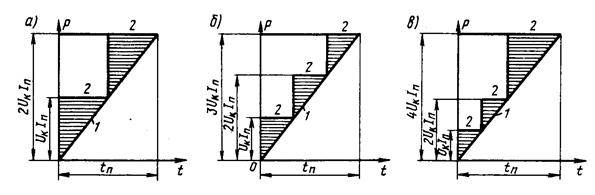 В том случае, если
имеется несколько группировок ТД, то диаграмма изменения потерь в пусковых резисторах
принимает ступенчатый вид. Это относится и к ступенчатому изменению пускового сопротивления.
Потери в пусковых сопротивлениях характеризуются коэффициентом пусковых потерь,
который в общем случае равен отношению мощности потерь в пусковых сопротивлениях
к мощности на совершение полезной работы. Так как потери энергии в пусковых резисторах
пропорциональны квадрату напряжения, то можно записать:
В том случае, если
имеется несколько группировок ТД, то диаграмма изменения потерь в пусковых резисторах
принимает ступенчатый вид. Это относится и к ступенчатому изменению пускового сопротивления.
Потери в пусковых сопротивлениях характеризуются коэффициентом пусковых потерь,
который в общем случае равен отношению мощности потерь в пусковых сопротивлениях
к мощности на совершение полезной работы. Так как потери энергии в пусковых резисторах
пропорциональны квадрату напряжения, то можно записать:
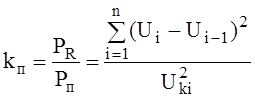 ,
,
где Ui, Ui–1 – напряжение на ТД на i-й и i–1-й группировках ТД.
n – количество группировок.
Пренебрегая потерями в ТД можно записать:
- для одноступенчатого пуска ТД kп = 1 (ЭТ2);
- для двухступенчатого пуска ТД kп = 0,5 (ЭР2);
- для трехступенчатого пуска шестиосного электровоза kп = 1/3 (ЧС2Т);
- для трехступенчатого пуска восьмиосного электровоза kп = 3/8 (ВЛ10, ВЛ11.
Следовательно с увеличением группировок ТД уменьшается доля пусковых потерь, но усложняется силовая схема ЭПС.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.