Балтийский Государственный Технический Университет
ВОЕНМЕХ им. Д.Ф. Устинова
Кафедра Е1
Лабораторная работа
РАСЧЁТ МЕХАНИЗМА КЛИНОВОГО ЗАТВОРА
Выполнил: Иванов И.Н.
группа Е191
Проверил: Агошков О.Г.
Санкт-Петербург
2014
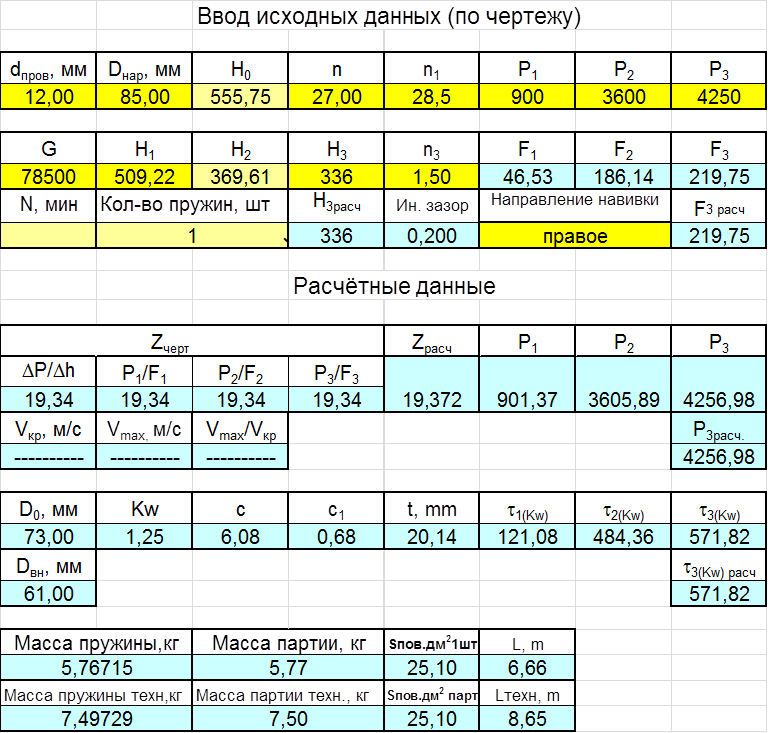
Расчет пружины:
Усилие предварительного поджатия принимаем:
![]() ;
; ![]() .
.
 ,
,
![]() .
.
Работа пружины:
 , где
, где ![]() - рабочий ход пружины.
- рабочий ход пружины.
 .
.
Энергия затрачиваемая на подъем клина:
 , где
, где ![]() -масса
клина;
-масса
клина;
![]() -скорость
клина;
-скорость
клина;
![]() -высота
подъема клина.
-высота
подъема клина.
 .
.
Имея величину энергии ![]() , можно
определить максимальную скорость, сообщаемую пружиной:
, можно
определить максимальную скорость, сообщаемую пружиной:
Жесткость пружины (в первом приближении):
 ;
;
 .
.
жёсткость пружины:

Жесткость одного витка:
![]() .
.
Далее подбираем стандартную пружину.
По формуле (2) ГОСТ13768-86,
пользуясь интервалом значений ![]() от
0,05 до 0,25 (формула (1) ГОСТ13765-86), находим граничные значения силы
от
0,05 до 0,25 (формула (1) ГОСТ13765-86), находим граничные значения силы ![]() , а именно:
, а именно:
 .
.
В интервале от 3789Н до 4800Н
в ГОСТ13768-86 пружин 1 класса, разряда 3 имеются следующие силы ![]() : 4000; 4250; 4500; 4750; 5000 Н.
: 4000; 4250; 4500; 4750; 5000 Н.
Исходя из стремления обеспечить наибольшую критическую скорость, остановимся на витке со следующими данными (номер позиции 219):
![]()
![]()
![]()
![]()
![]()
Учитывая, что для пружин 1
класса норма напряжений ![]() (ГОСТ13764-86),
находим, что для найденного диаметра проволоки расчетное напряжение:
(ГОСТ13764-86),
находим, что для найденного диаметра проволоки расчетное напряжение:
![]()
Принадлежность к 1 классу
проверяем путем определения отношения ![]() ,
для чего предварительно определяем критическую скорость по формуле (5)
ГОСТ13765-86:
,
для чего предварительно определяем критическую скорость по формуле (5)
ГОСТ13765-86:
Полученная величина указывает на отсутствие соударения витков и, следовательно, выбранная пружина удовлетворяет заданным условиям.
Далее определение остальных размеров производим по формулам табл.1 ГОСТ13765-86.
По формуле (6) находим жесткость пружины:
![]()
.
По формуле (7) определяем число рабочих витков пружины:
 .
.
Уточненная жесткость имеет значение:
 .
.
При полутора нерабочих витках полное число витков находим по формуле (8):
![]() .
.
По формуле (9) определяем средний диаметр пружины:
![]() .
.
Предварительную, рабочую и максимальную деформации определяем по формулам (11), (12), (13):
 ;
;
 ;
;
 .
.
Длину пружины при максимальной деформации, в свободном состоянии, при предварительной и рабочей деформациях вычисляем по формулам (14), (15), (16), (17):
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Шаг пружины в свободном состоянии вычисляем по формуле (18):
![]() .
.
Аналитическое решение:
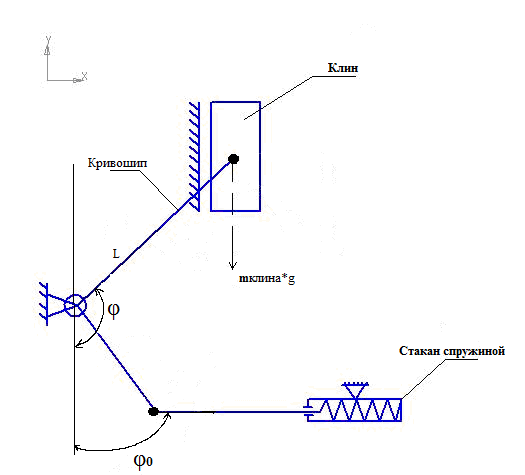
За обобщенную координату примем ![]() –
угол поворота кривошипа.
–
угол поворота кривошипа.
Тогда ![]() – обобщенная скорость (угловая
скорость).
– обобщенная скорость (угловая
скорость).
Кинетическая энергия системы:
![]() , где:
, где:
1) Кривошип (1) совершает вращательное движение вокруг точки М оси кривошипа.
 –
кинетическая энергия кривошипа.
–
кинетическая энергия кривошипа.
2) Клин (2) совершает поступательное движение.
 –
кинетическая энергия клина.
–
кинетическая энергия клина.
 –
потенциальная энергия пружины;
–
потенциальная энергия пружины;
3) Скорость клина:
![]() ;
;
 ;
;
4)  –
кинетическая энергия системы, где
–
кинетическая энергия системы, где ![]() –
приведенный момент инерции.
–
приведенный момент инерции.
 –
рабочий ход пружины, как функция
–
рабочий ход пружины, как функция ![]() .
.
Уравнение Лагранжа второго рода:
 .
.
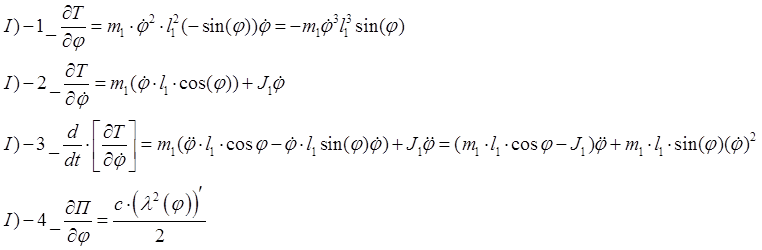
![]()

Определяем обобщённую силу ![]() :
:
Обобщённую силу необходимо определить в самом критическом
случае, т.е. при максимальном угле возвышения ![]() .
.
В итоге выражение для обобщённой силы имеет вид:
![]()
Масса заряда определяется следующим образом:
![]()
Коэффициент трения в направляющих
клина: ![]()
Коэффициент трения гильзы заряда: ![]()
Уравнение движения механизма клинового затвора запишем в виде:
![]()
Момент инерции кривошипа ![]() рассчитываем как момент инерции
консольной балки:
рассчитываем как момент инерции
консольной балки:
![]()
Масса кривошипа: ![]()
Плечо кривошипа: ![]()
Формируем начальные условия для решения уравнения:
Время: ![]()
Начальный угол поворота кривошипа: ![]()
Угловая скорость кривошипа: ![]()
Решение уравнения Лагранжа проведём при помощи пакета «MathCAD».
Необходимо обеспечить, чтобы за
некоторый промежуток времени угол поворота кривошипа ![]() достиг значения
достиг значения ![]() . Именно при этой конечной величине
угла поворота кривошипа можно обеспечить требуемую высоту подъёма клина (
. Именно при этой конечной величине
угла поворота кривошипа можно обеспечить требуемую высоту подъёма клина (![]() ).
).
В итоге получаем значения:
![]()
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

