
Лекция 2
ПРИНЦИПЫ РАДИОУПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ
2.1 Уравнение рассогласования.
Из бесконечного количества возможных траекторий выведения КА на орбиту на практике выбираются только такие, полет по которым выполняется с помощью достаточно простых технических средств и которые наиболее целесообразны с тактической точки зрения. Поэтому движение КА должно быть определенным образом ограничено, или, как говорят, на движение КА долины быть наложены связи. За счет разного рода внешних возмущений, несовершенства используемой аппаратуры, а также двигателя и конструкции КA при наведении последнего будет происходить нарушение связей, которое необходимо устранять. Мера нарушения связи, которую для одного из параметров выведения КА будем обозначать буквой D , называется параметром рассогласования (сигналом рассогласования системы управления или параметром управления). Измерение параметра рассогласования, вид которого определяется в значительной мере типом системы управления и используемым методом выведения КА. В связи с этим прежде всего необходимо получить уравнения рассогласования для различных типов систем управления и различных траекторий выведения. Анализ этих уравнений позволяет установить состав первичных измерителей, входящих в РКТК.
Уравнение рассогласования устанавливает зависимость параметра рассогласования от параметров движения КА.
Если связь, наложенная на движение КA системой управления, выполняется идеально, то в процессе выведения параметр рассогласования будет равен нулю, т.е.
D=0 Уравнение именуется уравнением идеальной связи.
Каждому конкретному виду уравнения рассогласования и соответственному уравнению идеальной связи сопоставляется вполне определенный метод выведения. Если в течение всего времени полета КA движется точно по траектории, для которой заполняется условие D=0, то говорят, что осуществляется идеальное выведение КА, а получающаяся при этом траектория называется опорной или кинематической. Если учесть ограниченную маневренность КА и инерционность систем управления, то можно рассчитать динамическую траектории КA. И, наконец, учитывая влияние различного рода случайных возмущений в процессе полета, получим фактическую траекторию КА.
2.2. ОСОБЕННОСТИ РАЗЛИЧНЫХ ЭТАПОВ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ И ТРЕБОВАНИЯ К РАДИОТЕХНИЧЕСКИМ КОМПЛЕКСАМ УПРАВЛЕНИЯ
Необходимость в управлении КА как целенаправленном процессе изменения его состояния для успешного выполнения задач, стоящих перед отдельным КА и КК в целом, возникает с момента схода РН с пусковой установки. Однако ввиду существенного отличия динамических участков полета от орбитального участка требования, предъявляемые к комплексам управления (в дальнейшем, если это не оговорено, будем считать, что это РТКУ, т.е. ПИК, КИК и РТК ПП), значительно различаются, что сказывается как на облике комплексов (структуре), так и на оснащенииих соответствующими средствами.
Управление
КА при выведении на основную или промежуточную орбиту характерно тем, что
практически осуществляется только управление движением, так как необходимая для
контроля этого этапа бортовая аппаратура включается еще до старта РН, а выполнение
целевых задач не планируется. Из теории полета известно, что при выведении на
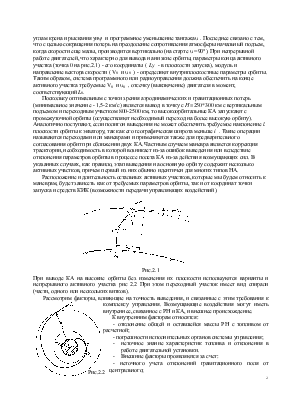
объект действуют три основные силы - сила тяги ![]() , сила
тяготения
, сила
тяготения
![]() и сила аэродинамического сопротивления
и сила аэродинамического сопротивления![]() (рис.2.1). Управление движением центра
масс обеспечивается изменением величины и направления (угла u) силы тяги в плоскости
выведения. При этом требуется стабилизация по углам крена и рыскания gиy и программное уменьшение тангажа u . Последнее
связано с тем, что с целью сокращения потерь на преодоление сопротивления
атмосферы начальный подъем, когда скорости еще малы, производится вертикально
(на старте u =90°). При непрерывной
работе двигателей, что характерно для вывода на низкие орбиты, параметры конца
активного участка (точка 0 на рис.2.1) - его координаты ( Ly
-
в плоскости запуска), модуль и направление вектора скорости ( V0 и u0 ) - определяют
внутриплоскостные параметры орбиты. Таким образом, система программного или
радиоуправления должна обеспечить на конце активного участка требуемые V0
и u0 , отсечку
(выключение) двигателя в момент, соответствующий L0.
(рис.2.1). Управление движением центра
масс обеспечивается изменением величины и направления (угла u) силы тяги в плоскости
выведения. При этом требуется стабилизация по углам крена и рыскания gиy и программное уменьшение тангажа u . Последнее
связано с тем, что с целью сокращения потерь на преодоление сопротивления
атмосферы начальный подъем, когда скорости еще малы, производится вертикально
(на старте u =90°). При непрерывной
работе двигателей, что характерно для вывода на низкие орбиты, параметры конца
активного участка (точка 0 на рис.2.1) - его координаты ( Ly
-
в плоскости запуска), модуль и направление вектора скорости ( V0 и u0 ) - определяют
внутриплоскостные параметры орбиты. Таким образом, система программного или
радиоуправления должна обеспечить на конце активного участка требуемые V0
и u0 , отсечку
(выключение) двигателя в момент, соответствующий L0.
Поскольку оптимальным с точки зрения аэродинамических и гравитационных потерь (минимальное значение - 1,5-2 км/с) является вывод в точку с Н =250*300 км с вертикальным подъемом и переходным участком 800-2500км, то высокоорбитальные КА запускают с промежуточной орбиты (осуществляют необходимый переход на более высокую орбиту). Аналогично поступают, если полигон выведения не может обеспечить требуемое наклонение l. плоскости орбиты к экватору, так как его географическая широта меньше i . Такие операции называются переходами или маневрами и применяются также для предварительного согласования орбит при сближении двух КА. Частным случаем маневра является коррекция траектории, необходимость в которой возникает из-за ошибок выведения или вследствие отклонения параметров орбиты в процессе полета КА из-за действия возмущающих сил. В указанных случаях, как правило, этап выведения на основную орбиту содержит несколько активных участков, причем первый из них обычно идентичен для многих типов НА.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.