Лекция 8
Принципы построения многоканальных систем передачи информации
Основные сведения о командных радиолиниях По условиям исполнения различает два класса радиокоманд: команда в реальном масштабе времени, которые исполняются сразу после приемаих на борту КА и команды временных программ, которые предварительно записываются в бортовое запоминающее устройство и исполняются в заданный момент времени по сигналу бортового программно-временного устройства или по дополнительной команде, переданной с пункта управления.
В зависимости от характера передаваемой информации радиокоманды подразделяются на количественные и функциональные. Количественные команда представляют собой числовые величины, которые в общем случав могут принимать положительные и отрицательные значения. Функциональные команды используются для выполнения различных служебных операций, например, для многократного и однократного включения (выключения различных бортовых устройств.
Количественные команды бывает аналоговыми и цифровыми. При формировании аналоговых команд на пункте управления используется счетно-решающий приборили различные датчики. Цифровые команды могут вырабатываться о помощью ЭВМили получаться в результате преобразования аналоговых команд в цифровые. Цифровые команды передаются по KPЛ в дискретные моменты времени. Передача аналоговых команд может осуществляться как непрерывно, так и дискретно во времени.
В зависимости от вида команд, передаваемых по каналам КРЛ, различают цифровое, аналоговые и комбинированные радиолинии. В комбинированных КРЛ имеется цифровые и аналоговые каналы.
Командные радиолиний представляет собой многоканальные радиолинии, которые обеспечивают передачу команд, адресованных тем или иным получателям (исполнителям) команд. В командных радиолиниях находят применение сигналы с двумя и тремя ступенями модуляции. При формированиитаких сигналов в каждом из каналов КРЛ используются гармоническиеили импульсные поднесущие колебания, которые модулируется командным сообщением (первая ступень модуляции). Гармоническое поднесущие колебание подвергается амплитудной, частотной или фазовой модуляции. В случае импульсного поднесущего колебания модулируется один из параметров импульсной последовательности, т.е. амплитуда, длительность, временное положение или частота следования импульсов.
В результате осуществления первой ступени модуляции образуются сигналы предназначенные для модуляции несущего колебания или поднесущих колебаний, которыми модулируется затем несущее колебание. Все операции, связанные с модуляцией поднесущих колебаний, осуществляется в аппаратуре кодирования и уплотнения каналов, входящей в состав аппаратуры пункта управления.
При обработке сигнала в приемном тракте сначала осуществляется демодуляция несущего колебания, затем - демодуляция поднесущего колебания. Последняя операция выполняется в аппаратуре разделения каналов и декодирования, расположенной на борту КА.
В КРЛ находят применение узкополосные и широкополосные сигналы, которые различается значением базы сигналы Вс= FсTс . где - ширина частотного спектра и длительность сигнала соответственно. В качестве широкополосных сигналов часто используется так называемые составные сигналы. Составные сигналы представляют собой упорядоченную совокупность некоторого числа элементарных сигналов, причем отдельные элементарные сигналы не имеет самостоятельного информационного значения используется только для формирования результирующих сигналов определенной структуры. Различают сомкнутые составные сигналы и составные сигналы с разрывной структурой, а также последовательные, параллельные и последовательно-параллельные составные сигналы.
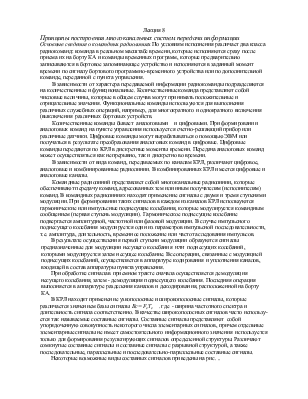
Некоторые возможные виды составных сигналов приведены на рис. ..
Примером последовательного составного сигнала о разрывной структурой является комбинация из п прямоугольных видеоимпульсов одинаковой длительности, разделенных фиксированными временными интервалами различной длительности (рис.8.1,а).Наличие паузопределяет разрывную структуру такого сигнала, который часто называют импульсно-временным сигналом.
Примером последовательного сомкнутого составного сигнала является комбинация из п. непрерывно следующих друг за другом во времени биполярных видеоимпульсов одинаковой длительности (рис. 8.1,б). Такой сигнал удобно применять для манипуляция фазы гармонического колебания. В итоге получается одночастотный сомкнутой последовательный составной сигнал (рис…, в). Многочастотный последовательный сомкнутыйили разрывной сигнал образуется в результате поочередной передачи во временя n различных по частоте гармонических колебаний конечной длительности (рис….г). База последовательного сомкнутого составного сигнала определяется соотношением Вс=nb,где n- общее число элем. сигналов, b- коэффициент, зависящий от формы элемент. Сигналов b=1,2
Способ приема составных сигналов основаны на знании их структуры и можно осуществить оптимальный прием.
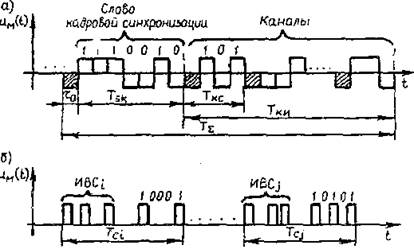
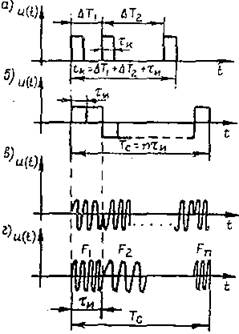
рис..8.2
Рис.а) соответствует временному уплотнению и синхронной передаче последовательности командных слов одинаковой длительности.
Рис.8.2) –структура двух командных посылок каждая из которых содержит отдельные информационные и адресные части, причем в общем случае эти посылки имеют разную длительность. Адресная часть посылается импульсно – временными сигналами, а командное слово – с помощью кодово - импульсной модуляции.
8.1. Принципы линейного разделения каналов
При линейном разделении каналов используется N модулирующих колебаний, которые являются функциями времени и частоты. В схеме разделения каналов поднесущие разделяются с помощью фильтров и далее после демодуляции получают аналоги первичных сигналов. Схема преобразования показана на рис..8.1
|
 |
||||||
 |
|||||||
 |
|||||||
Объединение Разделение
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.