Лекция 5
Множество данных, передаваемых по каналам связи, должно обеспечивать надежное управление множеством КА и ИП.
При планировании потоков необходимо определить какая телеметрическая информация должна обеспечивать рациональное управление КА.
. Если учесть большое число параметров, которые необходимо варьировать, и факторов, влияющих на качество и эффективность системы, то даже для быстродействующих каналов связи такая задача оказывается весьма трудоемкой. Максимально сократить число передаваемой информации позволяют способы многофакторного планирования экспериментов. На этапе создания модели системы обоснован вид зависимости Y=Q(X,U,g) , где У - выход,
Х - вход, U - управление, g={g1,g2,..gn} - неизвестные параметры модели. Будем считать , что кроме управления U на вход воздействует только среда С0 , т.е. Х = Х0 .Ее параметры в процессе работы контролируют, но влиять на них (управлять ими) не представляется возможным.
Для изучения поведения системы необходимо получить информацию I={xi,Ui,y i}. i=1,N , изменяя U и фиксируя в сериях экспериментов состояние среды, и по ней оценить неизвестные параметры модели {g1,…gn} . Теория оптимального эксперимента позволяет осуществить это с минимальным числом опытов. Применительно к рассматриваемым системам наиболее широко используется -оптимальное планирование испытаний, которому соответствует .минимум объема эллипсоида ошибок определения неизвестных параметров модели объекта, причем дополнительно ставится условие ортогональности плана, т.е. некоррелированности получаемых по нему оценок {g1,…gn}. Выполнить его удается не всегда, особенно при нелинейной модели объекта. Кроме того ортогональный план может и не быть -оптимальным. Для лучшего приближения к структуре РТК зависимость выхода от входных и управляющих воздействий представляют в виде композиции слабокоррелированных групп подобных описаний. Соответственно каждую группу можно рассматривать как представление подсистемы РТК через свой набор параметров, в результате чего появляется возможность на этапе анализа произвести идентификацию параметров произвести декомпозицию системы на подсистемы и строго определить вклад каждой из них в эффект функционирования всей системы. Такие операции могут быть осуществлены методами факторного анализа и позволяют подойти к нахождению внешних показателей эффективности. Математически процедура факторного анализа соответствует разбиению матрицы п х. п описания системы на подматрицы меньшей размерности ( п г*пг ), т.е. представлению ее в клеточном виде, причем так, чтобы внедиагональные клетки были близки к нулевым. Следовательно, в результате такого преобразования будут выделены блочные факторы, внутри которых наблюдается тесная взаимосвязь выхода с входящими в него параметрами (это и есть выделенная подсистема), более сильная, чем между самими блочными факторами (между подсистемами). В итоге эксперимент по уточнению параметров модели существенно упростится, так как размерность понизится с n2 до Sп2r , где nr<n,Sпr=п . Физически это эквивалентно переходу от анализа системы в целом к анализу ее отдельных, значительно более простых подсистем, с последующим анализом РТК уже на агрегированной модели.
РТКУ как система массового обслуживания использовалась для определения пропускной способности комплекса.
Выражение для системного показателя эффективности функционирования РТКУ, как вероятность выполнения операций технологического цикла управления (ТЦУ) по рассматриваемому классу КА. Будем считать, что каждая группа операций выполняется независимо и необходима в ТЦУ. Тогда
![]()
где Рн.о ~ вероятность навигационного обеспечения, зависящая от успешности операций по съему измерительной информации необходимого объема и качества, по передаче ее в Центр и по расчету параметров движения объекта;
РБО- вероятность баллистического обеспечения средств и объекта, зависящая от успешности операций по прогнозу движения объекта, используемых для расчета целеуказаний, динамических операций и программ временного и координатного управления;
РСВ - вероятность временного обеспечения управления, зависящая от успешности операций по сверке и коррекции бортовых и наземных шкал времени, по оценке и компенсации уходов эталонных частот;
Рфк- вероятность правильной оценки БА и условий функционирования объекта, зависящая от получения и обработки телеметрической информации;
Ркпо- вероятность достоверного командно – программного обеспечения, прием передача сигналов.
Таким образом, работа комплекса обеспечивается характеристиками функциональных каналов, а они определяются показателями выполнения частных операций.
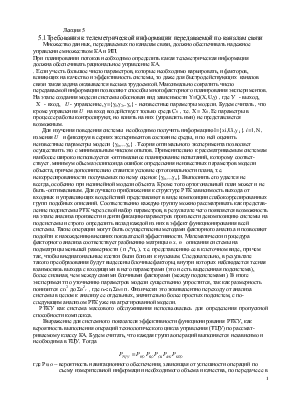
Обобщенные структурные схемы наземной станции (ИП) и бортовой аппаратуры показаны на рис 5.1
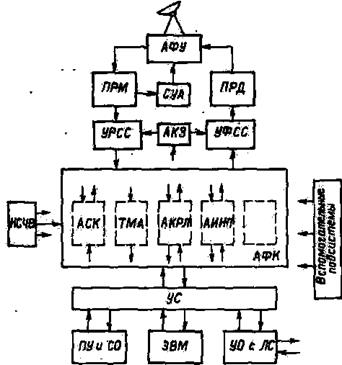 Рис.5.1
Рис.5.1
Передача информации АКРЛ- аппаратура командной радиолинии
Измерение текущих навигационных параметров КА –АИНП
Передача навигационных параметров о состоянии бортовой аппаратуры –ТМА
Синхронизация работы устройств и аппаратура сверки и коррекции АСК шкал.
БПВУ-бортовое программно временное уст-во.
Передача сигнала с помощью устройств формирования и разделения совмещенного сигнала УФСС, УРСС.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.