В зависимости от значений параметров орбиты и требований к точности прогнозирования (а это определяется целевыми задачами) движения КА проводятся навигационные измерения. Для некоторых объектов контроль траектории должен осуществляться практически на каждом витке (навигационные и геодезические КА), на других - раз в сутки или даже в неделю, месяц.
Процесс выполнения динамической операции – коррекция орбиты, посадка… обязательно контролируется как по телеметрической информации, так и по изменению параметров движения. Здесь требования к точности и оперативности навигационных определений примерно такие же, как и на этапе выведения. Расчет программы коррекции орбиты, маневра, сближения и стыковки производится с использованием тех или иных критериев оптимальности - минимума времени перехода, минимума расхода топлива, совпадения в заданный момент векторов скоростей и (или) координат. При коррекции изменение вектора скорости обычно не превышает 30-50 м/с, при сближении (выходе в заданную область пространства) - 100-200 м/с, при маневре с изменением внутриплоскостных элементов орбиты оно доходит до 0,5 км/с, при повороте плоскости орбиты - до 1,5-2 км/с. Динамическая операция стыковки характерна тем, что необходимо совпадение как координат, так и векторов скоростей. Если сближениеи маневр может проводиться по некоторой заранее рассчитанной программе, то стыковка обычно требует следящего управления, т.е. обратной связи в реальном масштабе времени, высокой оперативности. Это определяет специфику систем сближения, используемых при стыковке, в частности необходимость применения, как и на этапе вывода, многопараметрических высокоточных измерителей.При выводе КА на высокую орбиту необходимо дополнительно включать двигатель ,рис 2.3. при этом возрастают требования к измерителям скорости.
|
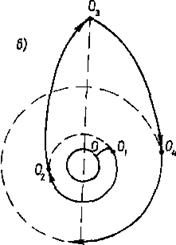
рис2.3
(ошибки в DV на I м/с приводят к неточности получения высоты апогея, равной 75 км, в то время как для низких круговых орбит неточность составляет лишь DH = 3,6 км). Таким образом, при проведении маневров требования к точности их контроля и отработки примерно такие же, как и при выведении КА. Управление объектом при спуске КА имеет свои особенности, связанные с тем, что аппарат входит в атмосферу на очень большой скорости (при выводе основная толща атмосферы преодолевался на сравнительно малых скоростях), и происходит резкий нагрев оболочки КА, ионизация окружающей среды. Однако большие вариации плотности атмосферы на высотах 100-40км ведут при пассивном торможении к существенному разбросу точки падения (посадки) и вызывают трудности дальнейшего поиска. В перспективных КА предполагается управляемый спуск вплоть до посадки. Второй эффект - нагрев оболочки КА и локальная ионизация атмосферы -обусловливают выбор допустимых углов входа КА (достаточно пологих) , применение специальных покрытий (абляционных - сгорающих и теплоизолирующих) спускаемого аппарата, а также специфических мер для обеспечения связи с КА через образующуюся плазменную трубку. Траекторию спуска можно разделить на три участка (рис.2.4):
- участок внеатмосферного снижения, на начальной части которого работает тормозная двигательная установка, а на осталь ных частях происходит свободное движение по эллиптической траектории, пересекающей плотные слои атмосферы (М > 100 км);
- атмосферный участок снижения, на котором происходит резкое торможение и изменение траектории, зависящее от угла входа в атмосферу (100 км>Н>10км);
- участок приземления, на котором становится возможным использование парашютных систем
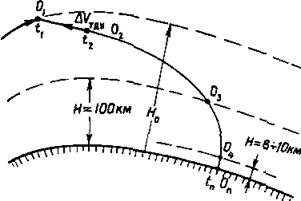
рис.2.4
Резкий нагрев КА и ионизация атмосферы происходят в слое с Н » 80¸30км, поэтому атмосферный участок снижения - наиболее сложный как для объекта, так и для радиотехнического комплекса управления. Возможные траектории спуска показаны на рис.2.5
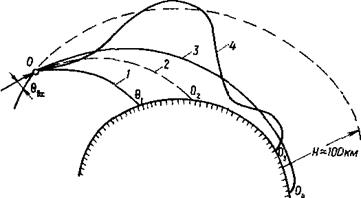
рис.2.5
Таким образом, общими требованиями к РТКУ на динамических участках полета КА является высокая точность и оперативность контроля и прогноза параметров движения (в ряде случаев - следящее управление - при стыковке), непрерывный анализ состояния бортовой аппаратуры и экипажа, высокая точность стабилизации и ориентации КА, расчетов времени и программы выполнения динамических операций.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.