Расчетная работы «К4»— плоское движение
Механизм состоит из кривошипов ОА и ВО1Е, совершающих вращательное движение вокруг неподвижных шарниров (точки O) и (точки O1) соответственно; двух шатунов АВ и EF, совершающих плоскопараллельное движение и ползуна F, движущегося поступательно.
Дано:
OA = 0,3 м; AB = 1,0 м; О1В=0,5 м;O1E = 0,4 м; О1О=1,0 м; EF = 1,2 м;
a = 90°; j = 0°; ![]() = 30 об/мин
= 30 об/мин
Определить:1. угловые
скорости звеньев ![]() ,
,![]() ,
,![]() ,
, ![]() и
скорости точек
и
скорости точек ![]() ,
, ![]() ,
, ![]() ,
,![]() ;
;
2. угловые ускорения звеньев ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
ускорения точек
и
ускорения точек
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Р е ш е н и е:
Определение угловой скорости и углового ускорения звена ОА :
![]() = 2 π 30/60 = π с-1=
const > 0,
= 2 π 30/60 = π с-1=
const > 0, ![]() O
O![]() ;
;![]() = 0.
= 0.
1. Определение угловых
скоростей звеньев ![]() ,
,![]() ,
,![]() ,
, ![]() и скоростей
точек
и скоростей
точек ![]() ,
, ![]() ,
, ![]() ,
,![]() .
.
Принцип решения задачи состоит в том, что задано движение кривошипа ОА, а кривошип ОА и шатун АВ имеют общую точку А; аналогично имеют общую точку В ─ шатун АВ и кривошип ВО1Е; общую точку Е ─ кривошип ВО1Е шатунEF; шатун EF и ползун F ─ общую точку F.
1) ![]() = p 0,3 = 0,3p
= p 0,3 = 0,3p
![]() , вектор направлен перпендикулярно ОА
в сторону вращения кривошипа, т.е.
, вектор направлен перпендикулярно ОА
в сторону вращения кривошипа, т.е. ![]() ^ ОА в сторону
^ ОА в сторону![]() .
.
![]() ,
откуда определяется величина угловой скорости звена АВ, где
,
откуда определяется величина угловой скорости звена АВ, где ![]() - мгновенный радиус, т.е. расстояние от
точки А до мгновенного центра скоростей ─
- мгновенный радиус, т.е. расстояние от
точки А до мгновенного центра скоростей ─ ![]() шатуна АВ, который в данном
случае лежит на пересечении перпендикуляров к линиям действия скоростей двух
точек А и В шатуна АВ (скорость точки А известна и
по величине и по направлению, а скорость его точки В ─ по направлению,
а именно
шатуна АВ, который в данном
случае лежит на пересечении перпендикуляров к линиям действия скоростей двух
точек А и В шатуна АВ (скорость точки А известна и
по величине и по направлению, а скорость его точки В ─ по направлению,
а именно ![]() ^ О1В,
т.е.
^ О1В,
т.е. ![]() лежит в точке O1,
т.е.
лежит в точке O1,
т.е. ![]() = ОА+ОО1 = 1.3 м ( либо
можно снять с чертежа с учетом масштаба).
= ОА+ОО1 = 1.3 м ( либо
можно снять с чертежа с учетом масштаба).
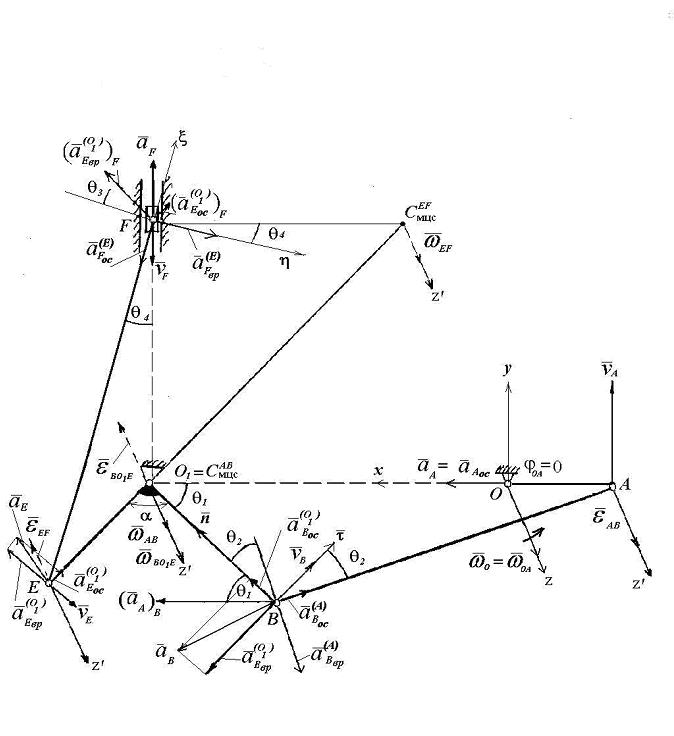
Рис. 4.2
Таким образом, ![]() = 0,3p
/ 1,3 = 0.23 p с-1. Исходя
из положения мгновенного центра скоростей
= 0,3p
/ 1,3 = 0.23 p с-1. Исходя
из положения мгновенного центра скоростей ![]() шатуна АВ
и направления скорости точки А ─
шатуна АВ
и направления скорости точки А ─![]() , определяем,
что вращение шатуна АВ происходит против хода часовой стрелки, т.е.
, определяем,
что вращение шатуна АВ происходит против хода часовой стрелки, т.е. ![]()
![]()
![]() .
.
2) ![]() = 0,23p 0,5 = 0,115p
= 0,23p 0,5 = 0,115p![]() , где
, где ![]() = ВО1
= 0.5 м . Вектор
= ВО1
= 0.5 м . Вектор ![]() направлен перпендикулярно О1В
в сторону
направлен перпендикулярно О1В
в сторону![]() , т.е.
, т.е. ![]() ^ О1В в сторону
^ О1В в сторону ![]() .
.
![]() ,
откуда определяется величина угловой скорости кривошипа ВО1Е:
,
откуда определяется величина угловой скорости кривошипа ВО1Е: ![]() = 0,115p/
0,5 = 0,23p с-;
= 0,115p/
0,5 = 0,23p с-;
![]() В
В![]() .
.
3) ![]() =
0,23p 0,4 = 0.092p
=
0,23p 0,4 = 0.092p ![]() . Вектор
. Вектор ![]() направлен перпендикулярно О1Е
в сторону
направлен перпендикулярно О1Е
в сторону ![]() , т.е.
, т.е. ![]() ^ О1Е в сторону
^ О1Е в сторону![]() .
.
![]() ,
откуда определяется величина угловой скорости звена EF,
где
,
откуда определяется величина угловой скорости звена EF,
где ![]() - мгновенный радиус, т.е. расстояние от
точки E до
мгновенного центра скоростей ─
- мгновенный радиус, т.е. расстояние от
точки E до
мгновенного центра скоростей ─ ![]() шатуна
EF,который в данном случае лежит на
пересечении перпендикуляров к линиям действия скоростей двух точек E и F шатуна EF (скорость точки E─
шатуна
EF,который в данном случае лежит на
пересечении перпендикуляров к линиям действия скоростей двух точек E и F шатуна EF (скорость точки E─![]() известна и по величине
и по направлению, а скорость его точки F─
известна и по величине
и по направлению, а скорость его точки F─ ![]() ─ по направлению, а именно по
вертикали О1F, т.е.
─ по направлению, а именно по
вертикали О1F, т.е. ![]() = 1.47 м (снято с чертежа с учетом
масштаба).
= 1.47 м (снято с чертежа с учетом
масштаба).
Таким образом, ![]() = 0,092 p
/ 1,47 = 0.063p с-1. Исходя
из положения мгновенного центра скоростей
= 0,092 p
/ 1,47 = 0.063p с-1. Исходя
из положения мгновенного центра скоростей ![]() шатуна EF и направления скорости точки E ─
шатуна EF и направления скорости точки E ─![]() , определяем, что вращение шатуна
EF происходит против хода часовой стрелки, т.е.
, определяем, что вращение шатуна
EF происходит против хода часовой стрелки, т.е. ![]()
![]()
![]() .
.
4) ![]() =
0.063 p 0,7=0.044p
=
0.063 p 0,7=0.044p ![]() , где
, где ![]() - мгновенный радиус, т.е. расстояние от
точки F до
мгновенного центра скоростей ─
- мгновенный радиус, т.е. расстояние от
точки F до
мгновенного центра скоростей ─ ![]() шатуна EF, и
шатуна EF, и ![]() = 0,7 м
(снято с чертежа с учетом масштаба). Вектор
= 0,7 м
(снято с чертежа с учетом масштаба). Вектор ![]() направлен
перпендикулярно
направлен
перпендикулярно ![]() в сторону
в сторону![]() ,
т.е.
,
т.е. ![]() ^
^ ![]() в сторону
в сторону ![]() .
.
О т в е т: ![]() =p
с-1;
=p
с-1; ![]() =0,23p с-1;
=0,23p с-1;![]() =0,23p с-1;
=0,23p с-1; ![]() =0,063p
с-1;
=0,063p
с-1;
![]() = 0,3p
= 0,3p ![]() ;
; ![]() =0,115p
=0,115p ![]() ;
;
![]() = 0,092p
= 0,092p
![]() ;
;![]() = 0,044p
= 0,044p
![]() .
.
2. Определение угловых
ускорений звеньев ![]() ,
, ![]() ,
, ![]() и ускорений точек
и ускорений точек ![]()
![]()
![]()
![]() :
:
1) ─Ускорение точки А:
![]() (
(![]() - по условию задачи).
- по условию задачи).
Вектор ![]() направлен к точке О,
т.е. к оси вращения кривошипа ОА.
направлен к точке О,
т.е. к оси вращения кривошипа ОА.
![]() м/с2.
м/с2.
2) ─Ускорение точки В шатуна, совершающего плоскопараллельное движение, определяется аналитически методом полюса. Для этого нужно знать ускорение какой-либо другой его точки. Очевидно, что такой точкой является точка А, принадлежащая одновременно кривошипу ОА и шатуну АВ, ускорение которой определено выше.
Приняв точку А за полюс, запишем уравнение (1), определяющее ускорение точки В, принадлежащей шатуну АВ:
 .
(1)
.
(1)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

