
Лабораторная работа № 2 по курсу ТММ
Структурный и кинематический анализ кулачковаго механизма
Вариант 6 - 8
Преподаватель: Лавров В.Ю.
Студент: Туркин А.И.
Группа: М-231
Санкт – Петербург
2005 год
1. Структурный анализ механизма
Исследуется плоский позиционный кулачковый механизма с толкателем, силовым замыканием, с роликовым контактом, структурная схема которого представлена на рис.1, где 1- кулачёк, 2 – толкатель, 3 – ролик, Р – рабочий профиль, Ц – центровой профиль, R0 – радиус базовой окружности, е – эксцентриситет, γ – угол давления.
Число степиней свободы механизма:
W=3n - 2p5 – p4 = 3 *2 – 2 * 2 – 1 = 1, где n – число подвижных звеньев, pk.– количество кинематических пар k – ого класса.
При вычислении числа степеней свободы ролик как пассивное звено и кинематические пары, им образуемые, не учитываются.
Механизм имеет четыре фазы работы: удаление, дальний выстой, возврат и ближний выстой. Соответствующие конструктивные углы кулочка, βУ, βД, βВ, βБ, обозначены на рис. 1.
На рисунке показан угол давления γ, измеряемый между вектором реакции R со стороны кулачка на толкатель и вектором скорости толкателя VT.
2. Кинематический анализ механизма
Кинематический анализ производится эксперементально-теоретически с использованим разложения в ряд Фурье. Функцию положения F(φ) толкателя 2 в зависимости от угла поворота кулачка 1 получаем экспериментально.
Полагая, что кулачек вращается равномерно с угловой скоростью ω = 50 1/с, получаем функцию положения толкателя от времени F(t), разлагаем её в ряд Фурье и дифферинцированем ряда определяем зависимости скорости V(t) и ускорения A(t) толкателя. При этом необходимо решить вопрос о достаточном числе членов ряда.
Разложение функции в ряд Фурье означает ее приближенную замену тригонометрическим полиномом вида.
![]()

где
T=2π, ω=2π*50=0,12566 с – время полного оборота кривошипа, ![]() - амплитуда сигнала на j-й
частоте.
- амплитуда сигнала на j-й
частоте.
Частота
сигнала для j-й гармоники ![]() T
T
Поскольку в данном случае функция F(t) заданна таблицей значений в конечном числе точек m, то максимальное число членов ряда n(max)=m/2/
Формулы для вычисления коэффициентов ряда Фурье при табличном значении функции:
 , где Fi –
значение функции F(ti),i-0,1,2,…m-1.
, где Fi –
значение функции F(ti),i-0,1,2,…m-1.
В таблице № 1 представлена эксперементальная зависимость функции перемещения толкателя F(φ) с шагом Δφ = 10˚ по углу поворота кулачка.
Таблица 1
|
φ |
0 |
0.175 |
0.35 |
0.525 |
0.7 |
0.875 |
1.05 |
1.225 |
1.4 |
1.575 |
1.75 |
1.925 |
|
s |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
|
2.1 |
2.275 |
2.45 |
2.625 |
2.8 |
2.975 |
3.14 |
3.325 |
3.5 |
3.675 |
3.85 |
4.025 |
4.2 |
|
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
2,3 |
2,0 |
1,1 |
1 |
|
4.375 |
4.55 |
4.725 |
4.9 |
5.075 |
5.25 |
5.425 |
5.6 |
5.775 |
5.95 |
6.125 |
6.3 |
|
0,4 |
0,1 |
0 |
0,4 |
0,7 |
1,2 |
1,7 |
2,3 |
2,5 |
2,5 |
2,5 |
2,5 |
Шаг по времени при этом: Δt= Δφ / ω= 10 * 3,14 / (50 * 180)= 0,00349 с.
Обработку данных эксперимента проведём с помощью программы FOURIER.
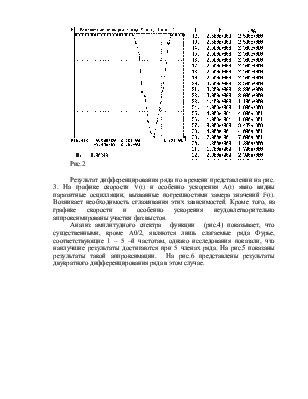
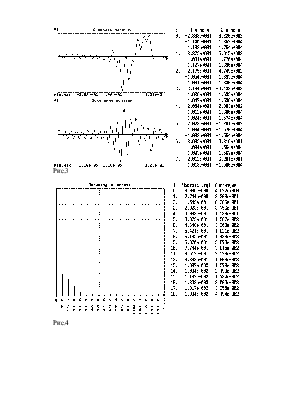
На первом этапе разложим F(t) в ряд с максимално возможным числом членов: s = nmax = m / 2= 36 / 2 = 18 (рис. 2). В этом случае значени ряда Фурье в узлах практически совпадают с данными эксперимента.
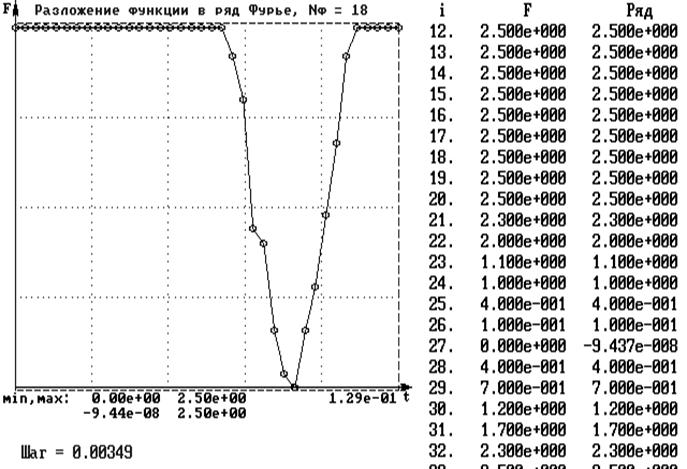
Рис.2
Результат дифференцирования ряда по времени представлении на рис. 3. На графике скорости V(t) и особенно ускорения A(t) явно видны паразитные осцилляции, вызванные погрешностями замера значений F(t). Возникает необходимость сглаживания этих зависимостей. Кроме того, на графике скорости и особенно ускорения неудовлетворительно аппроксимированы участки фаз выстоя.
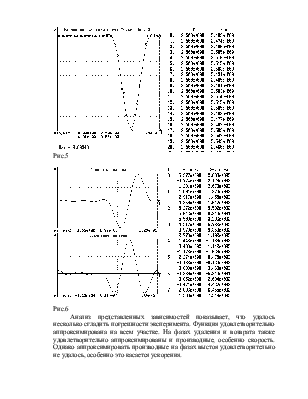
Анализ амплитудного спектра функции (рис.4) показывает, что существенными, кроме A0/2, являются лишь слагаемые ряда Фурье, соответствующие 1 – 5 –й частотам, однако исследования показали, что наилучшие результаты достигаются при 5 членах ряда. На рис.5 показаны результаты такой аппроксимации. На рис.6 представлены результаты двукратного дифференцирования ряда в этом случае.
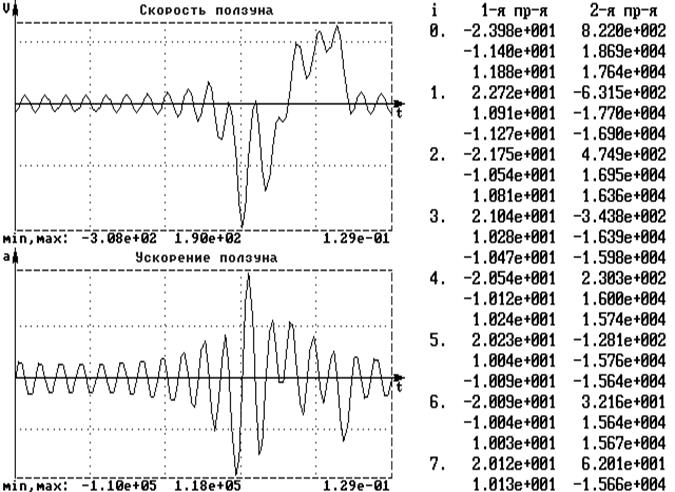
Рис.3
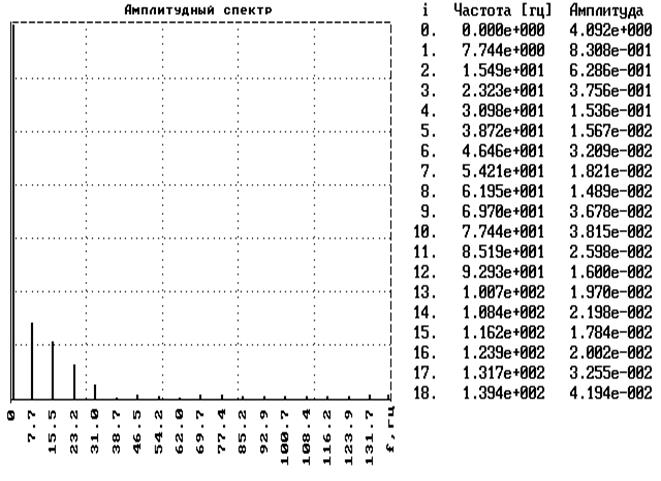
Рис.4
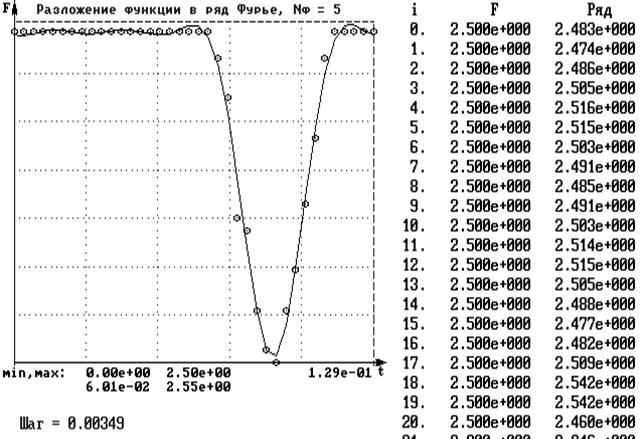
Рис.5
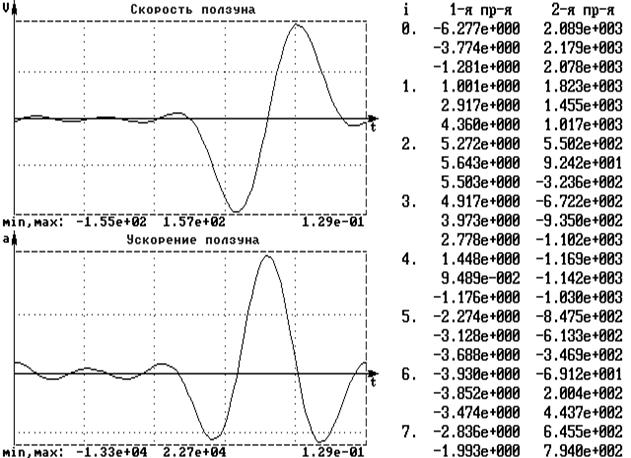
Рис.6
Анализ представленных зависимостей показывает, что удалось несколько сгладить погрешности эксперимента. Функция удовлетворительно аппроксимирована на всем участке. На фазах удаления и возврата также удовлетворительно аппроксимированы и производные, особенно скорость. Однако аппроксимировать производные на фазах выстоя удовлетворительно не удалось, особенно это касается ускорения.
Выводы по работе:
1. Ряд Фурье хорошо аппроксимирует лишь достаточно гладкие функции.
2. В данном случаи функция аппроксимирована удовлетворительно во всем диапазоне.
3. Производные аппроксимированы удовлетворительно на фазах удаления и возврата во всех точках этих фаз, кроме крайних. На краях фаз удаления и возврата имеются заметные погрешности, особенно для ускорения.
4. на фазах выстоя производные, особенно ускорение, аппроксимированы с большими погрешностями.
5. Если функция состоит из разнородных участков, о целесообразно аппроксимировать каждый участок в отдельности.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.