Главный механизм. Схема 6.2
Номер задания на курсовое проектирование: КР 9___ . 6__2 . 00_
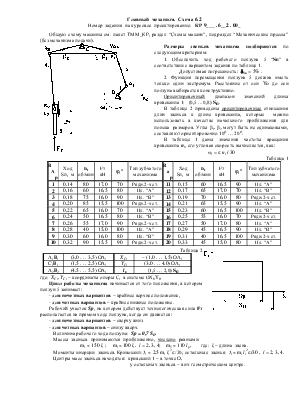
Общую схему машины см. пакет ТММ_КР, раздел “Схемы машин”, подраздел “Механические прессы” (без механизма подачи).
 Размеры
звеньев механизма подбираются по следующим
критериям:
Размеры
звеньев механизма подбираются по следующим
критериям:
1. Обеспечить ход рабочего ползуна 5 “SП” в соответствии с вариантом задания по таблице 1.
Допустимая погрешность: dSп = 5% .
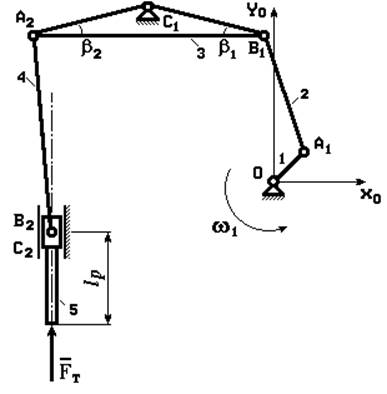
2. Функция перемещения ползуна 5 должна иметь только один экстремум. Расстояние от оси Yo до оси ползуна выбирается конструктивно.
Ориентировочныйдиапазон значений длины кривошипа 1: (0,5 ... 0,8) SП.
В таблице 2 приведены ориентировочные отношения длин звеньев к длине кривошипа, которые можно использовать в качестве начального приближения для поиска размеров. Углы b1, b2 могут быть не одинаковыми, составляют ориентировочно 10О … 20О.
В таблице 1 даны значения частоты вращения кривошипа n1, его угловая скорость вычисляется, как:
w1 = p n1 / 30
ВА р |
Ход Sп, м |
n1 об/мин |
Fт кН |
j1O |
Тип зубчатого механизма |
Ва р |
Ход Sп, м |
n1 об/мин |
Fт кН |
j1O |
Тип зубчатого механизма |
|
1 |
0,14 |
80 |
17,0 |
70 |
Рядн.2-х ст. |
11 |
0,15 |
60 |
16,5 |
90 |
Пл. “A” |
|
2 |
0,16 |
60 |
16,5 |
80 |
Пл. “A” |
12 |
0,17 |
65 |
17,0 |
70 |
Пл. “B” |
|
3 |
0,18 |
75 |
16,0 |
90 |
Пл. “B” |
13 |
0,19 |
70 |
16,0 |
80 |
Рядн.2-х ст. |
|
4 |
0,20 |
85 |
15,5 |
100 |
Рядн.2-х ст. |
14 |
0,21 |
65 |
15,5 |
90 |
Пл. “A” |
|
5 |
0,22 |
65 |
16,0 |
70 |
Пл. “A” |
15 |
0,23 |
60 |
16,5 |
100 |
Пл. “B” |
|
6 |
0,24 |
50 |
16,5 |
80 |
Пл. “B” |
16 |
0,25 |
55 |
16,0 |
70 |
Рядн.2-х ст. |
|
7 |
0,26 |
55 |
17,0 |
90 |
Рядн.2-х ст. |
17 |
0,27 |
50 |
17,0 |
80 |
Пл. “A” |
|
8 |
0,28 |
40 |
15,0 |
100 |
Пл. “A” |
18 |
0,29 |
45 |
16,5 |
90 |
Пл. “B” |
|
9 |
0,30 |
60 |
16,0 |
80 |
Пл. “B” |
19 |
0,31 |
40 |
16,5 |
100 |
Рядн.2-х ст. |
|
10 |
0,32 |
90 |
15,5 |
90 |
Рядн.2-х ст. |
20 |
0,33 |
45 |
15,0 |
80 |
Пл. “A” |
Таблица 2
|
A1B1 |
(3,0 . . . 3,5) OA1 |
XC1 |
– (1,0 . . . 1,5) OA1 |
|
C1B1 |
(1,5 . . . 2,5) OA1 |
YC1 |
(3,0 . . . 4,0) OA1 |
|
A2B2 |
(4,5 . . . 5,5) OA1 |
lp |
(1,5 … 2,0) SП |
где: XC1, YC1 – координаты опоры С1 в системе OX0Y0.
Цикл работы механизма начинается от того положения, в котором ползун 5 занимает:
- для нечетных вариантов – крайнее верхнее положение,
- для четных вариантов – крайнее нижнее положение.
Рабочий участок Sp, на котором действует технологическая сила Fт располагается на прямом ходе ползуна, когда он движется:
- для нечетных вариантов – сверху вниз
- для четных вариантов – снизу вверх.
Величина рабочего хода ползуна: Sp = 0,7 SП.
Массы звеньев принимаются приближенно, числено равными:
m1 » 150 l1 ; mi » 100 li , i = 2, 3, 4; m5 » 110 lp , где: li – длина звена.
Моменты инерции звеньев. Кривошип: J1 » 2,5 m1 l12 p/30; остальные звенья: Ji » mi li2 p/30 , i = 2, 3, 4.
Центры масс звеньев находятся: кривошип 1 – в точке O,
у остальных
звеньев – в их геометрическом центре.
Содержание курсовой работы
Введение
1. Структурный анализ главного механизма
2. Кинематический синтез главного механизма
Описываются критерии, по которым производится подбор размеров звеньев, приводится таблица принятых размеров и расчет погрешности реализации хода рабочего органа.
3. Кинематический анализ главного механизма
3.1. Постановка задачи
Описывается постановка задачи кинематического анализа применительно к исследуемому механизму.
Рисунок планов механизма для 12 положений.
Производится в одном положении механизма (называемом в дальнейшем “расчетным”), характеризующемся углом поворота кривошипа j1 от начала цикла, указанным в таблице 1.
3.2.1. Метод векторных контуров
3.2.2. Метод преобразования координат
3.3. Кинематические диаграммы
Графики и таблицы изменения кинематических параметров движения звеньев за полный оборот кривошипа:
а) Перемещение, скорость и ускорение ползуна 5.
б) Угол поворота, угловая скорость и угловое ускорение шатунов 2, 4 и коромысла 3 (только таблицы).
в) Скорости и ускорения центров масс шатунов 2, 4 и коромысла 3 (только таблицы).
4. Инерционные параметры главного механизма
Вычисление масс и моментов инерции звеньев
6. Проектирование привода
Описание постановки задач, решаемых в разделе.
Расчет требуемого передаточного отношения. Проектировочный расчет зубчатого механизма.
Описание постановки задач, решаемых в разделе и принципов, на которых базируется их решение.
Вычисление и анализ внешних сил, действующих на звенья главного механизма в расчетном положении.
7.2.2. Реакции в кинематических парах.
Силовой расчет структурных групп: определение реакций в кинематических парах.
Расчеты проводятся: для группы A2B2 – аналитически, для группы A1B1C1 – методом планов сил.
7.3. Изменение реакций в кинематических парах в процессе движения.
Графики изменения реакций в ползуне B2, в опоре С1, и в опоре кривошипа O за полный оборот кривошипа без учета сил трения..
Заключение
Литература
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.