


2.3. Общая графическая схема решения задачи и её описание
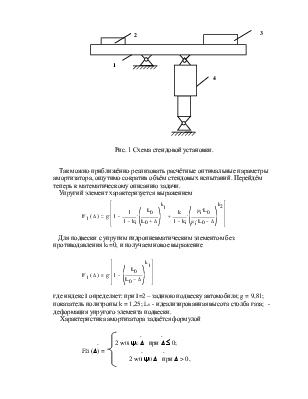
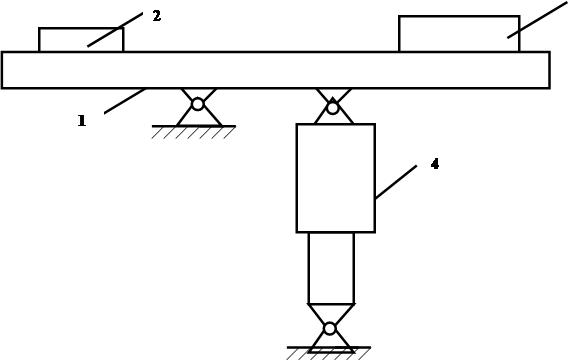
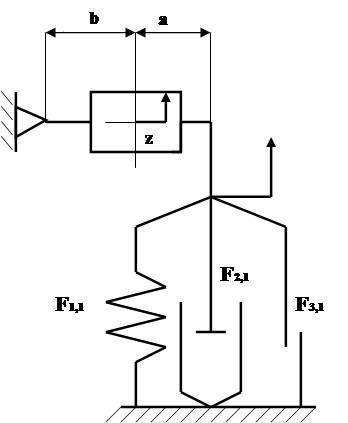
На рис. 1 показан общий вид испытательного стенда с качающейся балкой. Стенд служит для испытаний цилиндров гидропневматической подвески большегрузных автомобилей и определения проходных сечений клапанов амортизатора, обеспечивающих заданный режим колебаний.
Балка 1 может свободно качаться относительно оси 0 , если придать ей начальный угол отклонения. На балке находятся грузы 2 и 3, которые могут перемещаться вдоль оси балки. Это позволяет изменять статическую нагрузку на подвергающийся испытанию цилиндр 4 и изменять момент инерции балки 1 относительно оси 0.
В результате оптимизационных расчётов на математической модели большегрузного автомобиля удаётся установить числовые значения так называемых коэффициентов апериодичности, входящих в характеристику амортизатора, для ходов сжатия Yс и отбоя Y0.
Физическая реализация этих оптимальных параметров вызывает трудности по двум причинам: во-первых, подвеска имеет нелинейные характеристики, а коэффициент апериодичности однозначно характеризует свойства подвески с линейной характеристикой упругого элемента; во-вторых, конструктору необходимо знать, какой диаметр проходного отверстия амортизатора соответствует определённому значению коэффициента апериодичности. Однако такую зависимость в явном виде для цилиндра подвески с нелинейной характеристикой определить невозможно. Поэтому используется способ экспериментально-теоретический, заключающийся в следующем.
1. С помощью математического моделирования получают эталонные графики переходных процессов для передней (задней) подвески автомобиля при определённых (оптимальных) значениях коэффициентов периодичности c0 , соответствующие определённой статической нагрузке на цилиндр и начальному отклонению системы от положения статического равновесия.
2. Расчётным путём с помощью математической модели стенда определяются его необходимые настроечные параметры, затем стенд настраивается и подготавливается к испытаниям.
3. На стенде проводятся испытания цилиндра с определёнными проходными сечениями амортизатора для получения осциллограммы затухающих колебаний.
4. Полученная осциллограмма сравнивается с эталонным графиком. Если кривые совпадают, значит, найдены оптимальные проходные сечения амортизатора, в противном случае нужно изменить проходные сечения амортизатора и вернуться к п.3.
|
||||
 |
||||
Рис. 1 Схема стендовой установки.
Так можно приближённо реализовать расчётные оптимальные параметры амортизатора, ощутимо сократив объём стендовых испытаний. Перейдём теперь к математическому описанию задачи.
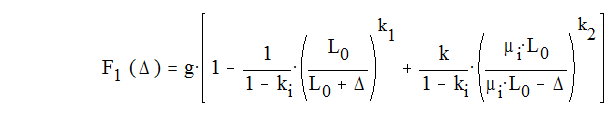
Упругий элемент характеризуется выражением
Для подвески с упругим гидропневматическим элементом без противодавления ki =0, и получаем новое выражение
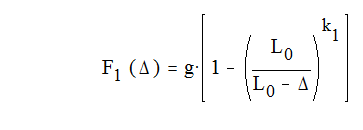
где индекс I определяет: при I=2 – заднюю подвеску автомобиля; g = 9,81; показатель политропы k = 1,25; L0 - идеализированная высота столба газа; - деформация упругого элемента подвески.
Характеристика амортизатора задаётся формулой
![]() . .
. .
. 2 w0i yc D при D £ 0;
F2i (D) = . .
2 w0i y0 D при D > 0,
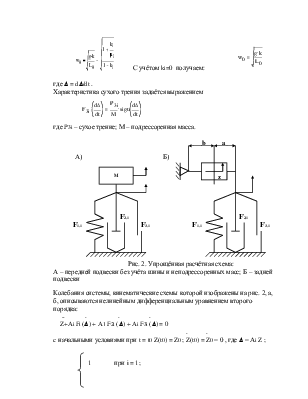
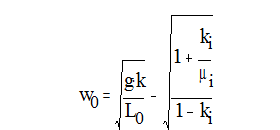 С учётом ki=0 получаем:
С учётом ki=0 получаем: 
где D = dD/dt .
где P3i – сухое трение; М – подрессоренная масса.
А) Б)
 |
|||
 |
|||
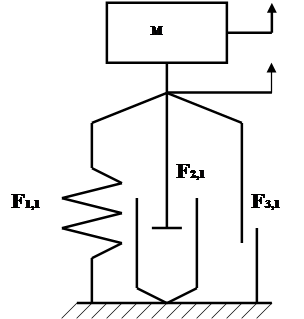
Рис. 2. Упрощённая расчётная схема:
Колебания системы, кинематические схемы которой изображены на рис. 2, а, б, описываются нелинейным дифференциальным уравнением второго порядка:
.. . . .
Z+Ai Fi (D) + A1 F2i (D) + Ai F3i (D) = 0
. .
c начальными условиями при t = t0 Z(t0) = Z0 ; Z(t0) = Z0 = 0 , где D = Аi Z ;
1 при i = 1;
Ai =
(a+b)/a при i = 2;
Если перейти к переменной D, получим:
.. ..
Z = D/Ai ; Z = D/Ai ;
|

с начальными условиями при t = t0 :
.
D(t0) = D0 ; D(t0) = 0.
Для того чтобы колебания подрессоренных масс на стенде и автомобиля были одинаковыми, необходимо соблюдение для обоих случаев условий равенства начальных статистических нагрузок на цилиндр и кинетических энергий систем.
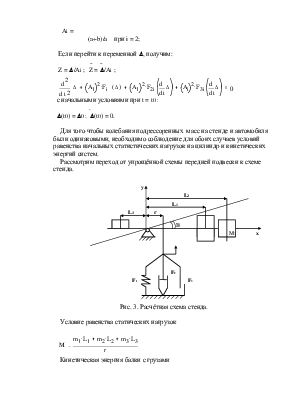
Рассмотрим переход от упрощённой схемы передней подвески к схеме стенда.
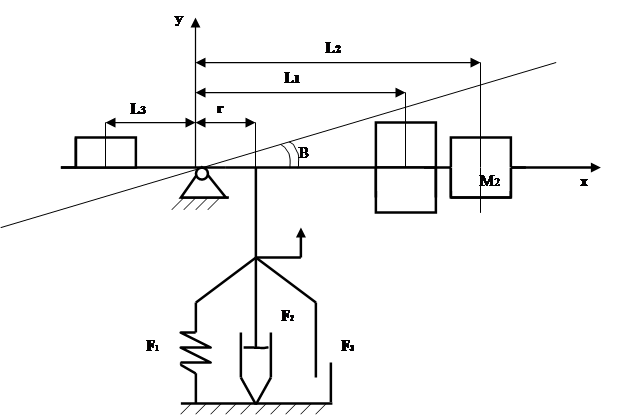 |
Рис. 3. Расчётная схема стенда.
Условие равенства статических нагрузок

Кинетическая энергия балки с грузами
где J – момент инерции системы относительно оси вращения.
. .
Если принять q = D/r и q = D/r , то
Кинетическая энергия передней подвески
Поэтому условие равенства кинетических энергий
Получаем систему:
|
Для перехода от упрощённой схемы задней подвески к схеме стенда получаем:


Таким образом получаем систему уравнений:
|


В общем случае выражение момента инерции зависит от переменных m1, L1, m2, L2, m3, L3. Приближённая формула имеет вид

где J1, J2, J3 – моменты инерции масс относительно их центров инерции.
Подставив в систему 1.1 выражение J и определив два параметра, наиболее удобных для настройки стенда (например, m2, L3 ), разрешаем относительно их систему.
Решив систему 1.1 для передней подвески получим:


где

Для задней подвески получим аналогичные выражения для m2 и L2, если вместо r в формулах подставить выражение:

По описанной выше методике расчеты могут быть выполнены для любых значений исходных данных.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.