













5 СПОСОБЫ РЕГУЛИРОВАНИЯ СКОРОСТИ В ВЫБРАННЫХ
ДВИГАТЕЛЯХ
5.1 Способы регулирования скорости в АД с короткозамкнутым ротором.
Ротор вращается в сторону вращения магнитного поля статора
 .
.
Из этого следует 2 способа регулирования скорости вращения:
1. изменение числа пар полюсов;
2. изменение частоты питающего напряжения.
Из уравнения движения
следует ,что при условии если нагрузка на валу двигателя постоянная, то изменяя Мэ будет изменяться скорость вращения ротора.
Тогда из уравнения механической характеристики
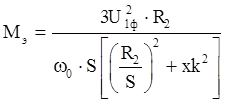
следует, что изменяя напряжение U1 меняется Мэ в квадратичной зависимости и, как следствие, скорость ротора.
5.1.1 Регулирование скорости вращения ротора изменением числа пар полюсов.
Из принципа действия АД следует, что данный
способ регулирования целесообразно применять при ![]() р, т.е.
р, т.е. ![]() n.
n.
Из чего следует что возникает необходимость в рассмотрении электромагнитных процессов с целью выбора оптимального режима работы.
Из двух имеющихся режимов:
1. увеличение числа пар полюсов;
2. уменьшение числа пар полюсов;
рассмотрим второй режим.
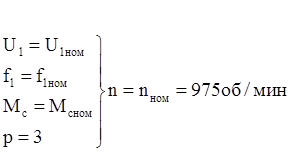
Предположим АД включен в сеть
При данных условиях уменьшим число пар полюсов:
Р = 2




Из чего следует, что скорость вращения ротора увеличивается до тех пор, пока Мэ не станет равен Мс
 .
.
Достоинство способа:
1. простота.
Недостатки способа:
1. ступенчатое ( дискретное ) регулирование скорости вращения;
2. при увеличении полюсности нужно отключать АД от сети с целью не допущения электродинамических и ударных нагрузок;
3. увеличении пар полюсов приводит к дополнительным пусковым режимам АД. Для того чтобы уменьшить пусковые нагрузки делают систему слежения за скоростью.
5.1.2 Регулирование скорости вращения ротора изменением частоты питающего напряжения.
Скорость вращения магнитного поля статора является функцией частоты и изменение частоты питающего напряжения приведет к изменению скорости вращения магнитного поля статора и, как следствие, скорости вращения ротора
 .
.
Т.к. при изменении частоты изменяется:
1. Скорость вращения магнитного поля статора

2. Реактивные сопротивления АД
![]()
Из чего следует, что существуют три варианта рассмотрения способа регулирования скорости вращения ротора изменением частоты питающего напряжения:
1. уменьшение частоты питающего напряжения;
2. увеличение частоты питающего напряжения;
3. соотношение между U1 и f1.
Рассмотрим первый вариант – уменьшение частоты питающего напряжения.
Предположим АД включен в сеть
Уменьшаем частоту питающего напряжения



Из чего следует что, по мере уменьшения скорости вращения ротора Мэ тормозной уменьшается до 0 – режим идеального холостого хода, при котором скорость вращения ротора стала равна скорости вращения магнитного поля статора
Дальнейшее уменьшение скорости вращения ротора происходит за счет нагрузки на валу двигателя
![]()
направление момента электромагнитного совпадает с направлением вращения ротора, т.е. встречно моменту нагрузки.
Из чего следует, что уменьшение скорости вращения ротора будет до тех пор, пока Мэ не станет опять равен Мс.
Достоинства способа:
1. регулирование скорости вращения в широком диапазоне;
2. плавное регулирование при сохранении жесткости механических характеристик.
Недостатки способа:
1. уменьшение надежности привода;
2. увеличение весогабаритного показателя на единицу;
3. уменьшение к.п.д. привода в целом;
4. необходимость в дополнительном устройстве ТПЧ, включаемом между сетью и АД, что приводит к увеличению стоимости.
5.1.3 Регулирование скорости вращения в АД изменением питающего напряжения обмотки статора (изменение скольжения ).
Предположим АД включен в сеть
Предположим питающее напряжение обмотку статора посредствам преобразователя ( регулятор переменного напряжения ) уменьшилось

![]()

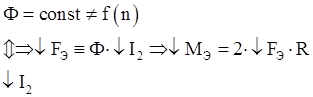
Уменьшение скорости вращения ротора за счет свойств саморегулирования в АД приведет:
![]()
![]()

т.е.
скорость вращения ротора уменьшается до тех пор, пока 
Из выше изложенного следует, что уменьшение питающего напряжения обмотку статора уменьшает скорость вращения ротора, т.к. при уменьшении U1 Мэ уменьшается в квадратичной зависимости, что приводит к уменьшению скорости, которая в свою очередь момент электромагнитный. Т.е. изменение питающего напряжения приводит к резкому уменьшению скорости вращения ротора.
Достоинство способа:
1. плавное регулирование скорости вращения в широком диапазоне скоростей, при условии незначительных моментов нагрузки.
Недостатки способа:
1. уменьшение жесткости механических характеристик;
2. уменьшение установленной мощности АД;
3. увеличение весогабаритного показателя на единицу установленной мощности;
4. дополнительное устройство ( регулятор напряжения ).
5.1.4 Выбор оптимального способа регулирования n и Mэ развиваемые двигателем.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.