Рассмотрев все вышеперечисленные способы регулированияn и Mэ можем сделать вывод, что наилучшим способом регулирования скорости вращения двигателя, является способ изменения частоты питающего напряжения. Данный способ позволяет осуществить плавное и устойчивое регулирование скорости электродвигателя переменного напряжения в широких пределах. В отличии от предыдущих способов регулирования скорости: коробок скоростей, механических вариаторов и т. п., данный способ позволяет получить наибольшую производительность и точность обработки, так как исполнительный орган производственного механизма вращается и перемещается поступательно, с соответствующей этому оптимальному режиму скоростью.
Данный способ регулирования приводит к значительному упрощению кинематики устройства и управления, удешевлению механизма, осуществления плавного регулирования скорости.
5.2 Способы регулирования скорости в ДПТ с независимым возбуждением.
Скорость вращения в ДПТ с независимым возбуждением определяется по следующей формуле:
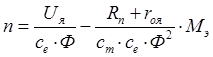
Из этого следует, что скорость вращения якоря можно регулировать следующими способами:
1. изменением питающего напряжения обмотку якоря;
2. изменением сопротивления пускового реостата;
3. изменением потока.
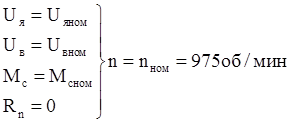
5.2.1 Регулирование скорости вращения якоря изменением питающего напряжения обмотку якоря.
Предположим ДПТ с независимым возбуждением включен в сеть
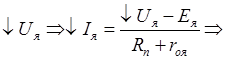


Из чего следует, что уменьшение скорости вращения якоря будет до тех пор, пока

Достоинства способа:
1. надежность и низкая стоимость;
2. плавная регулировка скорости вращения в широком диапазоне скоростей;
3. сохранение жесткости механической характеристики при изменении напряжения якоря;
4. меньше габаритный показатель по сравнению с приводом переменного тока с ТПЧ.
Недостатки:
1. уменьшение питающего напряжения уменьшает установленную мощность ДПТ;
2. необходимость в дополнительном устройстве (регулятор напряжения);
3. ухудшение гармонической составляющей потребляемого тока, уменьшение КПД и коэффициента мощности.
5.2.2 Регулирование скорости вращения якоря изменением сопротивления пускового реостата (реостатный).
Предположим ДПТ с независимым возбуждением включен в сеть
Из чего следует, что при увеличении сопротивления пускового реостата, скорость вращения якоря будет уменьшатся до тех пор, пока опять
Достоинство:
1. плавная регулировка скорости вращения в широком диапазоне скоростей простыми электротехническими устройствами (реостат).
Недостатки:
1. уменьшение КПД привода;
2. уменьшение установленной мощности двигателя;
3. уменьшение жесткости механической характеристики;
4. для ДПТ(мощных) с малым внутренним сопротивлением обмотка якоря ограничивает диапазон изменения скорости вращения якоря.
5.2.3 Регулирование скорости вращения якоря изменением
потока (полюсное).
Предположим ДПТ с независимым возбуждением включен в сеть
Из уравнения механической характеристики
следует, что изменение потока приводит к изменению скорости идеального холостого хода и просадки по скорости

Из чего следует, что изменение потока, приводя к изменению скорости идеального холостого хода, в основном и определяет скорость вращения якоря.
Фном определяется вебер-амперной характеристикой, из которой следует, что рабочая точка находится вблизи зоны насыщения.
Из чего следует, что регулировки скорости вращения якоря определяется линейным участком вебер-амперной характеристики, т.е. при номинальных значениях Ф целесообразно изменение скорости вращения якоря производить за счет уменьшения потока, которое приводит к увеличению скорости идеального холостого хода.
Из чего следует, что диапазон регулировки скорости вращения якоря относительно номинальной скорости будет находиться в верхней зоне.
Таким образом в ДПТ можно рассмотреть диапазон регулировки скорости применив два контура:
1. изменением питающего напряжения обмотку якоря – нижняя область;
2. изменением потока – верхняя область.
Поток является функцией тока возбуждения
Из чего следует что уменьшение потока за счет тока возбуждения можно осуществить
1. уменьшением Uв;
2. уменьшением Rв.
С целью увеличения КПД целесообразно изменение потока осуществлять изменением питающего напряжения обмотку возбуждения.
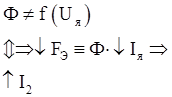
Предположим, питающее напряжение обмотку якоря уменьшилось относительно номинального значения

т.к. влияние Iя на момент электромагнитный по сравнению с влиянием Ф приблизительно 1:10, то уменьшение Ф приведет к увеличению Мэ за счет увеличения Iя

Т.к. просадка по скорости в квадратичной зависимости определяется потоком, то в зоне номинальных нагрузок ДПТ уменьшение Ф приводит к уменьшению жесткости

Т.е. при уменьшении питающего напряжения обмотку возбуждения скорость вращения якоря увеличивается до тех пор, пока опять Мэ=Мс

Полюсное регулирование в основном применяется для стабилизации (под-держания) скорости вращения якоря на требуемом уровне при изменении нагрузки на валу двигателя.
5.2.4 Выбор оптимального способа регулирования n и Mэ развиваемые двигателем.
Рассмотрев все вышеперечисленные способы регулированияn и Mэ можем сделать вывод, что наилучшим способом регулирования скорости вращения двигателя постоянного тока, является способ изменения питающего напряжения обмотку якоря.
Данный способ регулирования дает возможность регулировать скорость вниз от номинальной, что соответствует заданной диаграмме скоростей (рис. ). К.П.Д. двигателя остается высоким, так как никаких добавочных источников потерь в схему двигателя не вносится.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.