«ПРОГРАММИРУЕМЫЙ МИКРОКОНТРОЛЛЕР МКП–1»
Ознакомление с принципом работы и правилами программирования МКП-1.
2.ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
2.1. Назначение
Микроконтроллер программируемый МКП-1 предназначен для циклового двухпозиционного управления манипуляторами и технологическим оборудованием.
Областью наиболее эффективного применения микроконтроллера является управление робототехнологическими комплексами и автоматическими линиями при автоматизации технологических процессов в условиях серийного и мелкосерийного производства, когда требуются развитое программно-логическое управление, оперативная смена управляющих программ и когда использование стандартных средств вычислительной техники экономически нецелесообразно ввиду их высокой стоимости и сложности обслуживания.
2.2. Технические характеристики
а) Тип управления:
-цикловой (по временному, путевому или совмещенному принципам);
-программно-логический;
б) Программируемые функции:
-управление выходами на исполнительное устройство;
-прием информации, поступающей от датчиков состояния оборудования;
-формирование выдержек времени;
-управление счетчиками;
-обращение к подпрограммам;
-организация условных и безусловных переходов по программе;
-связь с управляющим вычислительным комплексом высшего ранга по интерфейсу последовательной передачи информации. в) Сервисные функции:
-редактирование программ;
-тестовый контроль модулей;
-контроль рабочих программ.
г) Режимы работы:
-под управлением программы, записанной в память рабочих программ (автоматическое управление);
-под управлением команд, поданных с пульта управления (ручное управление);
-пошаговое выполнение программы;
-запись команд в память рабочих программ (программирование);
-просмотр программы (вывод на индикацию содержимого памяти рабочих программ).
д) Система счисления при вводе информации с клавиатуры и выводе ее на дисплей – шестнадцатеричная.
е) Выходные сигналы для управления исполнительными устройствами:
-коммутируемое напряжение постоянного тока (20-30В);
-максимальный коммутируемый ток по каждому выходу (0.5А);
-падение напряжения на включенном выходе при токе нагрузки 0.25А – не более 2В.
ж) Параметры входных сигналов от внешнего оборудования:
-высокий уровень напряжения постоянного тока (20-30В);
-низкий уровень напряжения постоянного тока (не более 5В);
-входной ток при входном напряжении 24В (13 мА);
-время реакции на передний фронт входного сигнала (4 мс);
з) Число входов и выходов –16;
и) Объем памяти –0.5 Кбайт;
к) Число команд –256;
л) Микроконтроллер обеспечивает световую индикацию состояния каждого входа и выхода.
2.3. Конструкция микроконтроллера
В состав микроконтроллера входят следующие модули:
-пульт управления;
-модуль управления;
-модуль процессора;
-модуль энергонезависимого ЗУ;
-модуль памяти;
-модуль ввода дискретных сигналов;
-модуль преобразователя;
-модуль стабилизатора 5В;
-модуль стабилизатора 12В;
Все модули прикрыты с лицевой панели планками и доступны для внешнего осмотра.
На лицевой панели находятся также выключатель СЕТЬ, индикатор питающей сети, предохранители, индикаторы наличия напряжения: +5В, –5В ,+12В, индикаторы состояния входов и выходов, индикатор ОЖ, включенное состояние которого сигнализирует оператору о том, что микроконтроллер находится в режиме ожидания ввода с клавиатуры пульта управления. Кроме того, здесь располагается кнопка СБР и пульт управления.
На задней панели микроконтроллера располагаются розетки соединителей типа РП15-32 с обозначением:
|
|
||||
2.4. Режимы работы микроконтроллера
Режим «ВВОД ПРОГРАММЫ» (индикатор ВП) используется для записи кодов команд управляющей программы в ЭНЗУ (энергонезависимое ЗУ). Необходимая команда набирается оператором на клавиатуре ПУ. Процессор под управлением исполнительной программы считывает коды нажатых клавиш, формирует из них код команды и пересылает его в ЭНЗУ по адресу, определяемому счетчиком команд, который размещен в ОЗУ МП. По окончании пересылки каждой команды содержимое счетчика команд увеличивается на единицу.
Вводимая информация совместно с текущим значением счетчика команд отображается на дисплее ПУ. На рис. 1 приведена конфигурация внутренней структуры микроконтроллера в режиме «Ввод программы».
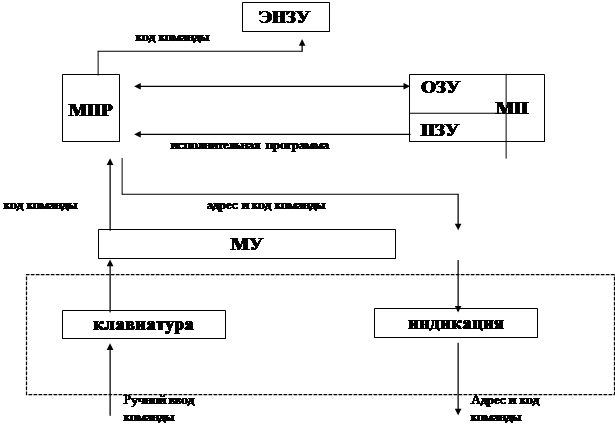 |
ЭНЗУ – энергонезависимое запоминающее устройство;
МПР – микропроцессор;
МП – модуль памяти;
Структура технических средств микроконтроллера в режиме «Просмотр программы» аналогична рассмотренной для режима «Ввод программы», однако направление прохождения информации противоположно. В соответствии с адресом ячейки ЭНЗУ, записанном в счетчике команд, процессор производит считывание содержащейся в этой ячейке информации и вывод ее на индикацию совместно с текущим значением счетчика. Содержимое счетчика команд модифицируется, и процессор переходит в режим ожидания нажатия клавиши, воспринимаемого им как команда вывода на индикацию содержимого очередной ячейки ЭНЗУ. Режим используется для контроля оператором управляющей программы, хранящейся в памяти. На рис. 2 приведена конфигурация внутренней структуры микроконтроллера в режиме «Просмотр программы».
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.