Содержание
Введение
1. Задание на разработку мехатронной системы позиционирования параболической антенны
2. Варианты схематических решений
3. Описание работы системы
4. Проектирование гидропривода позиционирования антенны
4.1. Описание работы привода
4.2. Расчет гидроцилиндра
5. Выбор аппаратуры системы позиционирования
6. Разработка программы управления приводом
Литература
Приложение
2. Варианты схемных решений
Позиционирование параболической антенны может осуществляться с помощью ручного (механического), электрического и гидравлического приводов. Эффективность выполнения задачи приводами оценивается следующими критериями:
· Жесткость;
· Быстродействие;
· Плавность регулирования;
· Автономность.
Ручной привод позиционирования. Данный тип привода обеспечивает необходимую жесткость системы (при использовании стопорных механизмов) и плавность регулирования. Недостатком является необходимость постоянного присутствия оператора и наличие аппаратуры для определения наличия сигнала.
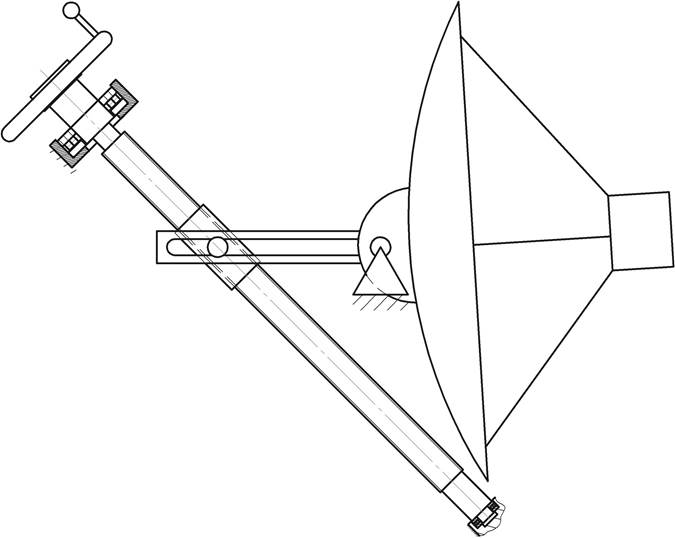
Рис.2.1. Ручное позиционирование параболической антенны
(передача «винт-гайка»)
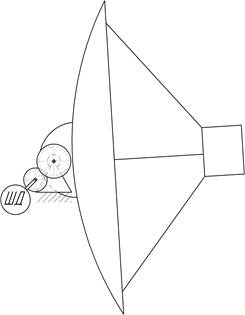
Электрический привод позиционирования. Данный тип привода может обеспечить жесткость системы (при использовании шагового двигателя), только при наличии постоянного электропитания, имеет большое быстродействие. Использование винтового домкрата и шагового двигателя обеспечивает наибольшую точность позиционирования, но не удовлетворяет условию позиционирования в пределах 90º. Плавность регулирования при использовании шагового двигателя будет зависеть от дискретности двигателя. Также, такой вид привода позволяет программно управлять положением антенны.
 а)
а)
 б)
б)
Рис.2.2. Позиционирование параболической антенны с использованием шагового двигателя:
а)
используя винтовой домкрат; б) используя цилиндрический редуктор.
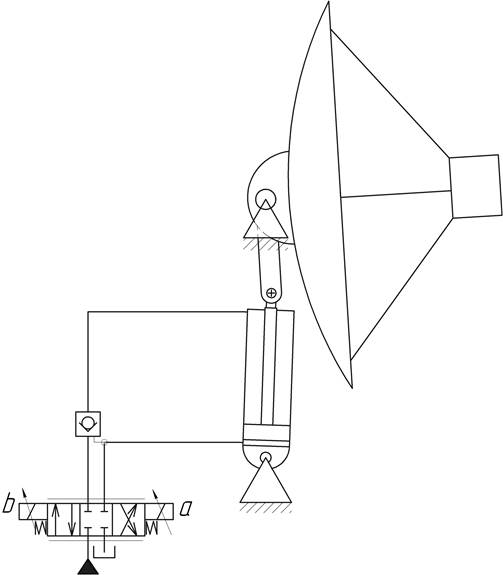
Гидравлический привод позиционирования. Обеспечивает необходимую
жесткость системы при отсутствии питания. Быстродействие немного ниже, чем у
электрического, но удовлетворяет требованиям. Плавность регулирования
обеспечивается с помощью пропорционального распределительного клапана.
Возможность работы привода на разных скоростях. Обладает наиболее высокой
автономностью.
|
Жесткость |
Быстродействие |
Плавность регулирования |
Автономность |
|
|
Ручной |
+ |
- |
+ |
- |
|
Электрический |
|
+ |
|
+ |
|
Гидравлический |
+ |
+ |
+ |
+ |
Рис.2.3. Позиционирование параболической антенны с использованием гидропривода
Оценка эффективности выполнения задачи. Таблица 2.1.
3. Описание работы системы
Данная мехатронная система позиционирования параболической антенны предназначена для автоматического обнаружения сигнала спутника и определения угла наклона параболической антенны относительно горизонта на данной широте.
5.2. Расчет гидроцилиндра
Исходные данные:
Диаметр антенны … Da=500 мм = 0,5 м;
Масса антенны … m=250 кг;
Длина плеча … l=140 мм = 0,14м;
Ход поршня … 120 мм;
Угловая максимальная скорость поворота антенны … ω=0.175 рад/с;
Скорость движения поршня … u=ω*l=0,014 м/с.
Рис. 6. Расчетная схема гидроцилиндра
. Рассчитаем нагрузку на шток.
Так как антенна совершает вращательные движения вокруг неподвижной оси, то нагрузкой будет являться момент силы.
Рассчитаем момент инерции:
![]()
где m – масса материальной точки (антенна), r – расстояние от токи к оси вращения.
![]()
Рассчитаем момент
силы, приняв угловое ускорение ![]() :
:
![]()
Определяем нагрузку на шток при повороте антенны:
![]()
Определяем нагрузку на шток при фиксации положения антенны:
Для определения диаметра штока произведем расчет на деформацию:

, где Δl = 0,0003 м – принятая допустимая деформация штока;
N = 15 кН – нагрузка на шток;
Е =
2,2*10![]() МПа – модуль упругости;
МПа – модуль упругости;
l = 0,16 м – принятая длина штока;
F = Π*d2/4 – площадь поперечного сечения штока.
Отсюда определим диаметр штока:

Принимаем диаметр штока d = 80 мм согласно ГОСТ 6540-68.
Внутренний диаметр цилиндра примем D = 160 мм по ГОСТ 6540-68.
Рассчитаем давление необходимое для выдавливания и подъема дежи по формулам:
 ;
; 
Отсюда:
 ;
;

Принимаем по ГОСТ 12445-80:
p1 = 12.5 МПа; p2 = 10.0 МПа.
Определим потребный расход при выдвижении штока и подводе крышки в рабочую область:
Q = V*Π*D2/4 = 0.025*3.14*0.162/4 = 0,0005 м3/с = 30 л/мин.
Принимаем Q = 32 л/мин по ГОСТ 13825-80.
Определим расход при выдавливании:
Q’ = V’* Π*D2/4 = 0.0035*3.14*0.162/4 = 0.00007 м3/с = 4,2 л/мин.
Примем Q’ = 5 л/мин по ГОСТ 13825-80.
Определим потребный расход при поднятии дежи:
Q’’ = V* Π*(D2-d2)/4 = 0.025*3.14*(0.162-0.082)/4 = 0.0004 м3/с = =24 л/мин.
Принимаем Q’’ = 25 л/мин по ГОСТ 13825-80.
Расходы Q’ и Q’’ получим с помощью регулирующей аппаратуры – дросселей, установленных на выходных патрубках поршневой и штоковой полостей, и регулятора расхода, установленного на входном патрубке поршневой полости. Переключение на регулятор расхода производится с помощью 3/2 – моностабильного распределителя.
Определим диаметры подводящих отверстий:
Рабочая жидкость, наряду с функцией рабочей среды, смазывает поверхности трения и защищает их от коррозии, охлаждает рабочую систему, удаляет из нее продукты сноса пар трения.
Комплекс требований, предъявляемых к рабочим жидкостям, достаточно широк, поэтому подобрать рабочую жидкость, удовлетворяющую всем требованиям одновременно, практически невозможно. Наиболее подходящей рабочей жидкостью является минеральное масло.
Минеральное масло, рекомендуемое для применения в системе общепромышленного назначения и его основные характеристики приведены в таблице 6.
|
Таблица 6 |
Характеристика масла |
||||
|
Марка масла |
Плотность, кг/м3 |
Вязкость v·106, м/с2 |
Температура, ° С |
Условия применения |
|
|
Вспышки |
Затвердева-ния |
||||
|
Индустриальное И-20А |
900 |
17-23 (при температуре 500С) |
180 |
-15 |
В гидросистемах станков, прессов, горных машин. |
Определим толщину стенки
В качестве материала гильзы гидроцилиндра выбираем Сталь 45
ГОСТ 50-20 σдоп= 240 МПа.
Согласно третей и четвертой теориям прочности:

где S – толщина стенки цилиндра; D – внутренний диметр цилиндра; σ – допустимое напряжение; р - рабочее давление.
Принимаем S = 10 мм.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.