С выходным валом механически связан и реостатный датчик обратной связи, по соотношению сопротивлений плеч которого можно судить о положении вала.
После отключения питания электродвигателя выходной вал исполнительного механизма продолжает еще некоторое время двигаться. Такое движение после отключения питания до полной остановки, обусловленное инерционностью всех подвижных частей механизма, называется выбегом. Для снижения выбега шестерни большого диаметра, применяемые в редукторе, изготавливаются из дюралюминия, что значительно уменьшает инерцию редуктора.
Шестерни редуктора сменные, что позволяет регулировать скорость вращения выходного вала, обеспечивая его поворот на 180˚ за 10, 15, 22, 30, 45, 60, 75, 90, 105 и 120 с. Заводом-изготовителем исполнительные механизмы собираются с настройкой 30 с.
Потребляемая мощность электрического двигателя исполнительного механизма 60 Вт. Число оборотов ротора электродвигателя 1500 об/мин. Минимальный вращающий момент на выходном валу 100 кг*см при настройке 30 с.
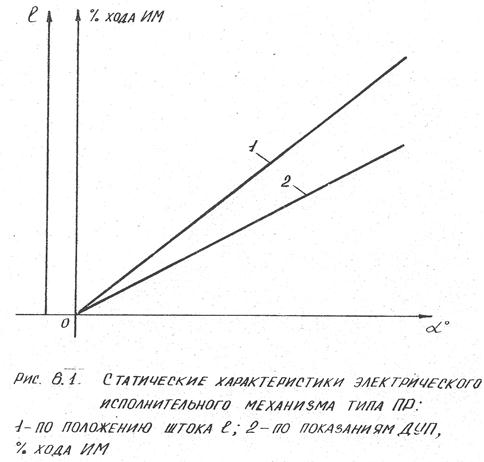
На рис. 6.1. приведены статические характеристики электрического исполнительного механизма типа ПР по положению штока и показаниям дистанционного указателя положения ДУП, подключенного к реостатному датчику механизма.
2. Описание лабораторного стенда
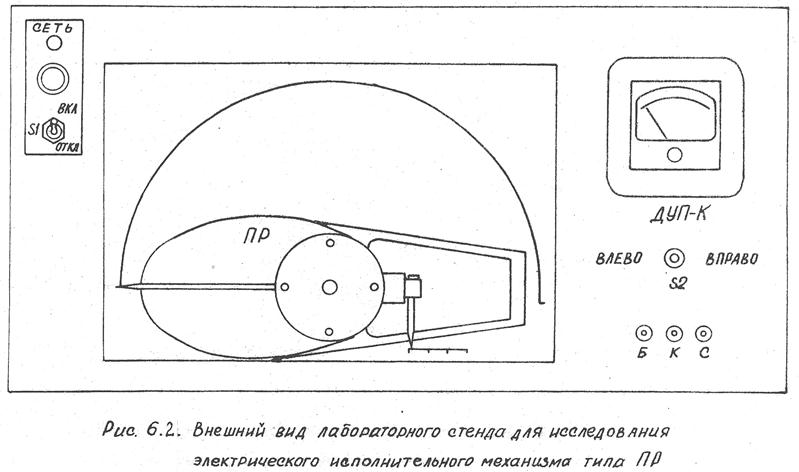
Внешний вид лабораторного стенда приведен на рис.6.2. В нише стенда размещен электрический исполнительный механизм типа ПР, снабженный указателями положения, прикрепленными к диску выходного вала и к штоку. Ниша прикрыта прозрачной пластиной, на которую нанесена угловая шкала для контроля положения выходного вала и. линейная шкала для контроля положения штока исполнительного механизма.
На лицевой панели стенда установлены:
1) Дистанционный указатель положения выходного вала исполнительного механизма ДУП-К.
2) Тумблер 8 I для включения питания стенда с предохранителем и индикаторной лампой.
3) Тумблер S2 для включения исполнительного механизма в одну или в другую сторону.
4)Клеммы для контроля датчика обратной связи исполнительного механизма.
Принципиальная электрическая схема лабораторного стенда приведена на рис. 6,3.
3. Определение среднего времени поворота вала исполнительного механизма
1) Тумблером S1 включить питание схемы.
2) Тумблером S2 включить исполнительный механизм влево и установить его вал в крайнее левое положение.
3) Тумблером &2 включить исполнительный механизм вправо и определить время t1поворота вала до крайнего правого положения (до срабатывания концевого выключателя).
4) Тумблером S2 включить исполнительный механизм влево и определить время t1 поворота вала до крайнего левого положения (до срабатывания концевого выключателя).

5) Определить среднее время поворота вала исполнительного механизма
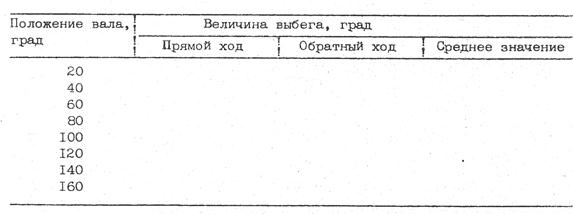
4. Определение выбега исполнительного механизма
1) Тумблером S2 включить исполнительный механизм вправо и, при прохождении указателем положения вала отметки 20˚ вернуть тумблер, S2 в среднее положение. Определить в градусах и занести в. табл. 6.1
величину выбега для указанного положения при прямом движении вала.
2) Аналогично определить и занести в табл. 6.1 величину выбега для положений вала, кратных 20° при движении его в прямом направлении»
3) Определить и занести в табл. 6.1 величину выбега для положений вала, кратных 20°, при движении его в обратном направлении. Вычислить средние значения величины выбега для положений вала, кратных 20°.
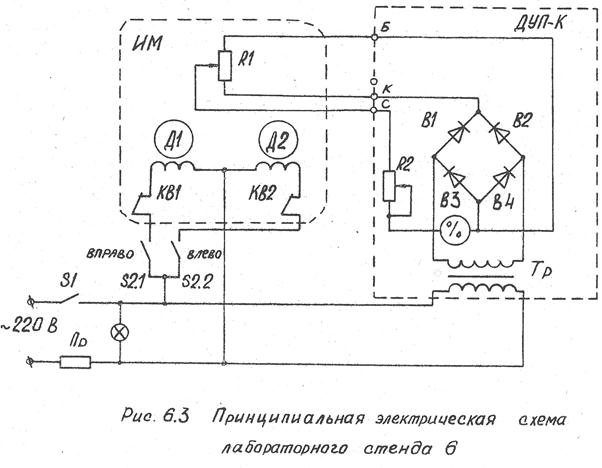
Таблица 6.1
Результаты определения выбега исполнительного механизма
5. Определение статических характеристик исполнительного механизма
1) Тумблером S1 включить
исполнительный механизм (ИМ) вправо и, фиксируя в табл. 6.2 положения вала и
штока, определить зависимость между ними l=f(![]() ).
).
2) Вернуть вал исполнительного механизма в крайнее левое положение
и снять зависимость между показаниями ДУП-К и положением вала, % хода ИМ
=f(![]() ).
).
По данным табл. 6.2 построить графики зависимостей l=f(![]() ) и % хода ИМ =f(
) и % хода ИМ =f(![]() ).
).
Таблица 6.2
Статические характеристики исполнительного механизма
6. Контрольные вопросы
1) Назначение электрических исполнительных механизмов.
2) Принцип работы электрического исполнительного механизма типа ПР.
3) Устройство электрического исполнительного механизма типа ПР.
4) Причины возникновения выбега и пути его уменьшения.
5) Вид статических характеристик электрического исполнительного механизма . типа ПР.
6) Применение электрических исполнительных механизмов типа ПР.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1.  Подлесный Н. И., Рубанов
В.Г. Элементы систем автоматического управления и контроля – Киев: Выща школа,
1982.
Подлесный Н. И., Рубанов
В.Г. Элементы систем автоматического управления и контроля – Киев: Выща школа,
1982.
2.  Коновалов Л. И., Петелин Д. П. Элементы и системы электроавтоматики.
Коновалов Л. И., Петелин Д. П. Элементы и системы электроавтоматики.
3. Квартин М.И. Электромеханические и магнитные устройства автоматики и их расчет. - М.: Высш. шк., 1973. - 344 с.
4. Бутусов И.В. Автоматические контрольно-измерительные и регулирующие приборы. - Л.: Гос. науч.-техн. изд-во нефт. и горно-топл. пром-ти, 1963. - 624 с.
5. Боборыкин Н.А. Элементы электроавтоматики, телемеханики и вычислительной техники. - Л.: Судостроение, 1967. - 362 с.
СОДЕРЖАНИЕ
Правила работы в лаборатории………………………………………….…...…….3
Правила безопасности при выполнении лабораторных работ………….………..3
Обработка результатов, оформление отчета и его защита………….……………4
Общие указания……….…………………………………………………………….4
Лабораторная работа 1. Исследование индуктивных датчиков……...........……..5
Лабораторная работа 2. Исследование трансформаторных датчиков…….…….10
Лабораторная работа 3. Исследование ферродинамических преобразователей…………………………………………………………………...16
Лабораторная работа 4. Исследование сельсинов……………………………..…22
Лабораторная работа 5. Исследование электрических исполнительных механизмов типа ПР………………………………………………………...……...29
Список рекомендуемой литературы……………………………………………………………………..…...34
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.