Лабораторная работа № 9
Балансировка ротора
Цель работы: динамическая балансировка ротора при неизвестном расположении неуравновешенных масс.
Оборудование: лабораторная установка ТММ-1К (балансировочный станок системы Б.В. Шитикова).
Общие положения
(см. соответствующий раздел лаб. работы №8)
Спроектированный и изготовленный ротор, как правило, неуравновешен вследствие неоднородности материала, погрешности изготовления и т.п. Кроме того, в практике случаи, когда известны величины и положения неуравновешенных масс (см. лаб. работу №8), встречаются редко. Поэтому любой быстроходный ротор должен быть подвергнут динамической балансировке на специальных станках (машинах).
Описание установки ТММ-1К
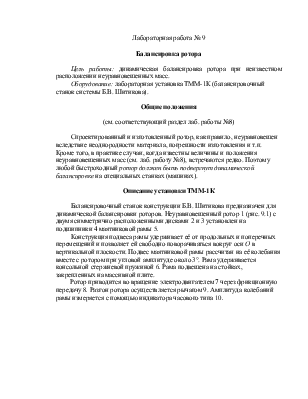
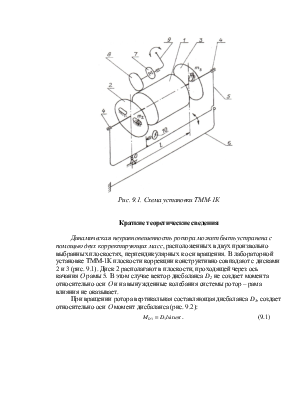
Балансировочный станок конструкции Б.В. Шитикова предназначен для динамической балансировки роторов. Неуравновешенный ротор 1 (рис. 9.1) с двумя симметрично расположенными дисками 2 и 3 установлен на подшипники 4 маятниковой рамы 5.
Конструкция подвеса рамы удерживает её от продольных и поперечных перемещений и позволяет ей свободно поворачиваться вокруг оси О в вертикальной плоскости. Подвес маятниковой рамы рассчитан на её колебания вместе с ротором при угловой амплитуде около 3°. Рама удерживается консольной стержневой пружиной 6. Рама подвешена на стойках, закрепленных на массивной плите.
Ротор приводится во вращение электродвигателем 7 через фрикционную передачу 8. Разгон ротора осуществляется рычагом 9. Амплитуда колебаний рамы измеряется с помощью индикатора часового типа 10.
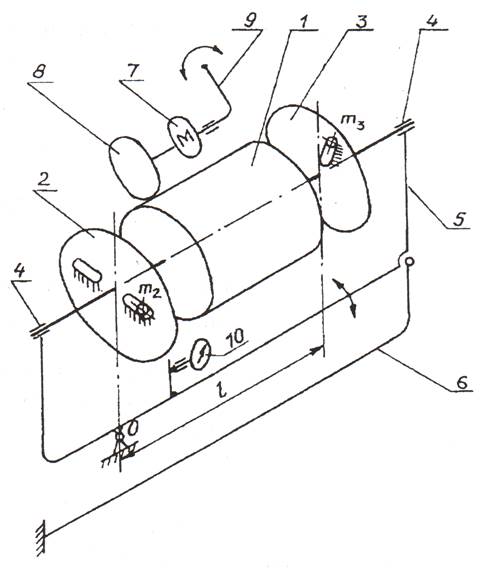
Рис. 9.1. Схема установки ТММ-1К
Краткие теоретические сведения
Динамическая неуравновешенность ротора может быть устранена с помощью двух корректирующих масс, расположенных в двух произвольно выбранных плоскостях, перпендикулярных к оси вращения. В лабораторной установке ТММ-1К плоскости коррекции конструктивно совпадают с дисками 2 и 3 (рис. 9.1). Диск 2 располагают в плоскости, проходящей через ось качания О рамы 5. В этом случае вектор дисбаланса D2 не создает момента относительно оси О и на вынужденные колебания системы ротор – рама влияния не оказывает.
При вращении ротора вертикальная составляющая дисбаланса D3, создает относительно оси О момент дисбаланса (рис. 9.2):
|
|
(9.1) |
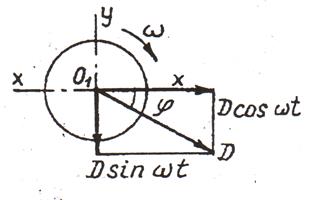
Рис. 9.2. Схема воздействия дисбаланса на ротор
Момент ![]() , изменяющийсяпо гармоническому закону с частотой
ω, равной угловой скорости ротора, вызовет вынужденные колебания рамы с
установленным на ней ротором. При свободном выбеге частота ω будет
убывать и когда она станет равной частоте собственных колебаний рамы, возникнет
резонанс. Максимальную амплитуду резонансных колебаний можно зафиксировать
индикатором 10. Из теории колебаний известно, что амплитуда вынужденных
колебаний пропорциональна амплитуде возмущающего фактора:
, изменяющийсяпо гармоническому закону с частотой
ω, равной угловой скорости ротора, вызовет вынужденные колебания рамы с
установленным на ней ротором. При свободном выбеге частота ω будет
убывать и когда она станет равной частоте собственных колебаний рамы, возникнет
резонанс. Максимальную амплитуду резонансных колебаний можно зафиксировать
индикатором 10. Из теории колебаний известно, что амплитуда вынужденных
колебаний пропорциональна амплитуде возмущающего фактора:
![]() .
.
При резонансе амплитуда вынужденных колебаний пропорциональна дисбалансу:
|
|
(9.2) |
где ан — максимальная амплитуда колебаний системы, вызванных силами инерции от неуравновешенной массы, мм; μ — коэффициент пропорциональности, зависящий от параметров станка, мм/г∙мм; DН — среднее арифметическое абсолютных значений дисбаланса, г∙мм; DН = mHrH.
Для определения коэффициента μ и параметров корректирующих масс балансируемой детали на диске 3 (см. рис. 9.1) устанавливают дополнительную массу mД, длякоторой дисбаланс
|
|
(9.3) |
Для определения величины начального дисбаланса в плоскости диска 3 применяют способ трех пусков (рис. 9.3).
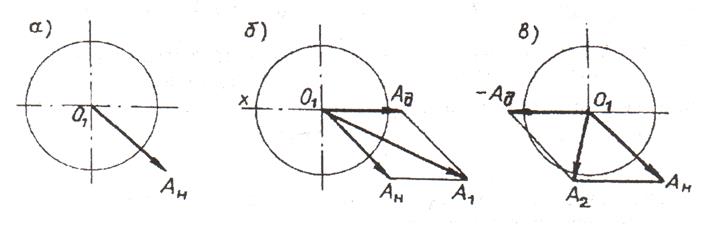
Рис. 9.3. Амплитуды при способе «трех пусков»
При первом пуске (рис. 9.3, а) определяют максимальную амплитуду Ан колебаний рамы, вызванных дисбалансом DН, от неуравновешенной приведенной массы в плоскости диска 3.
При втором пуске (рис. 9.3, б) определяют амплитуду А1 колебаний рамы, вызванных неуравновешенной приведенной массой mh и дополнительной массой mД(выбирается из набора грузов и устанавливается на произвольном расстоянии rД):
|
|
(9.4) |
При третьем пуске (рис. 9.3, в) находят амплитуду A2 колебаний, вызванных теми же факторами, но с грузом тд, установленным в диаметрально противоположной точке:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.