Задание алгоритма функционирования φ0 (t) может вырабатываться как специальным техническим устройством – задатчиком программы 1, так и выполняться в виде конструктивного элемента управляющего устройства 2, передающего управляющее воздействие на объект 3. В последнем случае блок 1 отсутствует. В обоих случаях схема представляет собой вид разомкнутой цепи, в которой основное воздействие передается от входного элемента к выходному. Близость φ0 и φ обеспечивается только конструкцией и подбором физических закономерностей, действующих во всех элементах.
Примером разомкнутого управления является механизм привода клапанов газораспределения в четырехтактных ДВС и в двухтактных ДВС с прямоточно-клапанной продувкой. Как известно, точность воспроизведения рассчитанных параметров наполнения и выпуска зависит от точности изготовления механизма и степени износа его элементов. Отсутствие реакции на фактическое состояние системы – неустранимый недостаток. Поэтому при конструировании механизма газораспределения необходимо выбирать ход клапана, исключающий удар поршня о клапан при зависании последнего.
Принцип компенсации (управление по возмущению).
Если возмущающие воздействия столь велики, что разомкнутая цепь не обеспечивает требуемой точности выполнения алгоритма функционирования, в некоторых случаях применяют метод измерения возмущения и внесения корректив в алгоритм управления по результатам замеров.
Когда отклонение регулируемой величины зависит не только от управляющего ξ, но и от возмущающего воздействия λ, т.е. φ = F1(ξ1, λ), в принципе можно подобрать управляющее воздействие ξ = F2(λ) таким образом, чтобы в установившихся режимах отклонение отсутствовало:
Δ φ = φ0 – F1(ξ 1, λ) = 0
В простейшем линейном случае, если характеристика объекта в статике
φ0 = k0· ξ – k λ · λ,= const,
ξ = φ 0/k0 + k λ · λ /k0
Функциональная схема регулирования по возмущению показана на рис. 3. Нагрузка измеряется с помощью измерительного устройства 4. На вход управляющего устройства 2 подается сигнал, равный сумме заданного значения φ0 и величины, пропорциональной нагрузке.
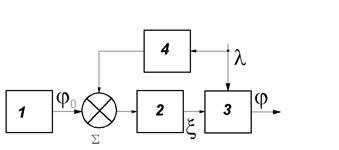
Рис. 3
Принцип компенсации применяется в электрических генераторах постоянного тока (генераторы с компаундной обмоткой возбуждения).
Принцип обратной связи (регулирование по отклонению)
Достоинством регулирования по отклонению является отсутствие необходимости измерять возмущающие воздействия. Например, в ДВС основным возмущающим воздействием является изменение момента сопротивления на валу, возможно также изменение теплоты сгорания и цетанового числа топлива, параметров воздуха на всасывании. Замер этих возмущающих воздействий затруднителен.
На рис. 4 показана схема, в которой коррективы в алгоритм управления вносятся по фактическому значению координат в системе. Измерительное устройство 4, подает на вход управляющего устройства 2 сигнал, пропорциональный отклонению управляемой координаты φ. Схема имеет вид замкнутой цепи, т.е. в ней осуществляется принцип управления по замкнутому контуру.
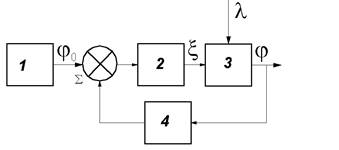
Рис. 4
Введенную дополнительную цепь называют обратной связью, т.к. передача воздействия в дополнительной связи противоположно направлению передачи основного воздействия на объект. Сумматор Σ осуществляет вычитание φ из φ0, т.е. вырабатывает величину Δ φ, называемую отклонением, или ошибкой управления.
Наиболее распространенная задача управления – поддержание заданных законов изменения во времени параметров объекта (регулирование). Поэтому целесообразно вырабатывать управляющее воздействие в функции не только Δ φ, но также его производных и интегралов по времени.
 Δφ= φ0
– φ
Δφ= φ0
– φ
Для осуществления регулирования необходимо, чтобы функция f являлась неубывающей функцией Δφ и одного с ней знака. Относительно других аргументов ее знак определяется из анализа.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.