В процессе вычисления процессор может выполнять операции сложения, умножения, деления и другие, способные привести к переполнению разрядной сетки ЭВМ. Полученный в результате расчета дискретный сигнал r* вновь подвергается округлению до ближайшего стандартного значения и затем в дискретные (тактовые) моменты времени передается в ЦАП. Если число разрядов микропроцессора составляет, например, 8, а число разрядов ЦАП составляет 4, то в ЦАП вновь производится округление (рис. 6.9, д), после чего сигнал поступает на экстраполятор, превращающий цифровой код в кусочно-линейный сигнал.
В большинстве микро ЭВМ используются экстраполяторы нулевого порядка, называемые фиксаторами. Они превращают цифровой сигнал в аналоговый ступенчатый r(t), который и поступает на исполнительное устройство, т. е. в непрерывную часть системы.
При компоновке электронного регулятора кроме квантования сигнала по времени следует установить квантование сигнала по уровню и выбрать число разрядов микропроцессора. Необходимость квантования сигналов по времени и уровню превращает электронный регулятор в существенно нелинейный элемент САР. Нелинейная зависимость, связывающая непрерывный сигнал х и его квантованный аналог х, показана на рис. 9, а (шаг квантования q).
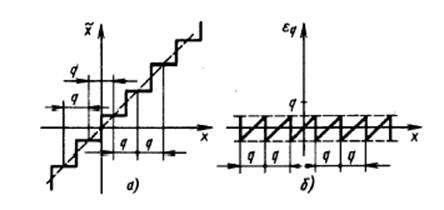
Рисунок 9 Квантование сигнала:
а — связь непрерывного сигнала х с его квантовым аналогом x; б – квантования по уровню; q — шаг квантования
Такое квантование приводит к появлению определенной погрешности εq в передаче сигнала (рис. 9, б) по уровню. С учетом динамического характера переходного процесса и образования нелинейных характеристик и связей погрешность εq может превзойти принятое максимальное значение q/2 и даже привести к автоколебаниям.
При выборе шага квантования по времени следует учитывать, что по мере уменьшения шага Δt квантования, как правило, улучшаются показатели качества процесса регулирования, появляется возможность управлять более сложными объектами, увеличивается полоса частот воспринятых сигналов. Вместе с тем уменьшение Δt приводит к резкому возрастанию сложности реализации такой системы, а следовательно, и стоимости микропроцессора. Кроме этого, наличие погрешности εд, достигающей q/2, делает заведомо нецелесообразными попытки исключить е{, так как вполне достаточно обеспечить εt < q/2. Практика показала, что для систем с апериодическим переходным процессом при отсутствии запаздывания при выборе Δt можно ориентироваться на минимальное значение коэффициента дифференциального уравнения элемента, входящего в САР, который характеризует его инерционность. Если таким коэффициентом является, например, Тр, то выбор Δt должен удовлетворить неравенству
Тр min/8 < Δt < Тр min\4
Если задано допустимое время переходного процесса системы tp, то при выборе Δt можно пользоваться неравенством
tp/15 < Δt< tp/6.
После установления требуемой разрядности микропроцессора и шага квантования по времени можно выбрать серийный микропроцессор, посредством которого может быть реализован требуемый закон регулирования.
К основным недостаткам электрических (электронных) регуляторов следует отнести необходимость электрической энергии, исчезновение которой влечет отключение системы регулирования, а также практическую невозможность ремонта системы регулирования вне заводских условий. В связи с этим электронные системы следует строить в виде легко заменяемых блоков, наличие которых должно быть предусмотрено перечнем запасных деталей и узлов силовой установки.
Литература:
1. Автоматическое регулирование и управление двигателей внутреннего сгорания. Пятое издание. Под редакцией В.И. Крутов. Москва, «Машиностроение» 1989 г.
2. Автоматизация управления установок с ДВС. Учебное пособие. Под редакцией Ю.В. Галышев, Л.Е. Магидович, В.В. Румянцев. ЛСПбГПУ 2002 г.
3. Калинина М.И., Галышев Ю.В. Управление в технических системах. Учебное пособие. 2008
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.