Для дизелей средней и большой мощности форсунки с непосредственной связью иглы с электромагнитом (см. рис. 4, а) оказались неприемлемыми в связи с чрезмерной массой подвижных частей. Электромагнит, способный развивать в таких форсунках необходимое усилие, не способен обеспечить требуемого быстродействия. Устранение этого недостатка обеспечивается включением в конструкцию форсунки клапана 4 (рис. 4, б). Рабочим телом в такой форсунке является топливо высокого давления, воздействующее на иглу 1, а электромагнит 3 выполняет лишь функцию управления подъемом легкого клапана 4. Такая конструкция форсунки изолирует электрическую часть от полости высокого давления, существенно уменьшает подвижную массу и, как следствие, заметно повышает быстродействие.
Система электрического управления форсунками обеспечивает возможность более гибко управлять самим процессом топливоподачи в цилиндры двигателя по сравнению с регулированием через рейку топливного насоса. Однако необходимость высокого быстродействия срабатывания форсунки требует образования электрических командных импульсов высокой мощности, что обусловливает большой расход энергии и, следовательно, увеличения мощности источников питания. В связи с этим системы электронного управления через форсунки целесообразнее применять на дизель-генераторных установках, обеспечивающих для системы, регулирования практически неограниченную подачу электроэнергии. Для транспортных силовых установок автотракторного типа в настоящее время признаются более целесообразными электронные системы управления, действующие через рейку топливного насоса.
ЭЛЕКТРИЧЕСКИЕ РЕГУЛЯТОРЫ ЧАСТОТЫ ВРАЩЕНИЯ С ЭЛЕКТРОННЫМИ БЛОКАМИ УПРАВЛЕНИЯ
Датчиком частоты вращения в регуляторе, принципиальная схема которого приведена на рис. 5, является тахогенератор 1 с постоянным магнитом. В качестве исполнительного элемента использован электромагнит 3 пропорционального действия. Значения входных координат, которые поступают на электронный блок управления 5, в процессе работы синтезируются, в результате чего вырабатывается сигнал управления, воспринимаемый электромагнитом 3.
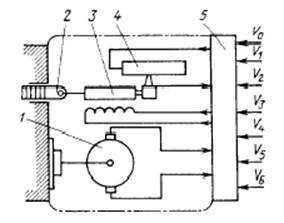
Рисунок 5 Электрический регулятор с электронным блоком.
Так, например, при сбросе нагрузки и увеличении угловой скорости ω ротора тахогенератор 1 подает, сигнал в электронный блок 5, который воспринимает также сигналы потенциометра 4, характеризующие положение рейки 2 и, следовательно, цикловую подачу топлива. Этот потенциометр выполняет функцию жесткой электрической обратной связи. Сигналы в электронном блоке синтезируются с сигналами: V0 — задатчика скоростного режима (при всережимном регуляторе), обеспечивающего выбор регуляторной характеристики; V1 — задатчика статизма (наклона) регуляторных характеристик; V3 — задатчика коррекции цикловой подачи топлива по давлению наддува. На этот же блок могут поступать сигналы от датчиков давления и температуры окружающей среды, теплового состояния двигателя и др.
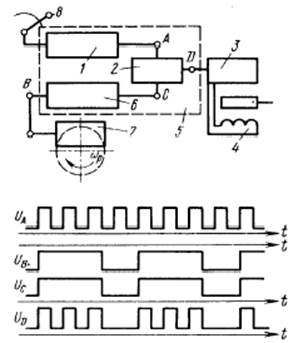
Рисунок 6 Функциональная схема электронного регулятора частоты вращения:
/ — генератор постоянных импульсов; 2 — сумматор; 3 — усилитель; 4 — исполнительный элемент (электромагнит); 5 — чувствительный элемент частоты вращения; 6 — ждущий мультивибратор; 7 — индуктивный датчик; 8 — задатчик
В качестве датчиков в регуляторах могут использоваться также различные электронные устройства. На рис. 6 показана функциональная схема одного из таких устройств, предназначенного для измерения частоты вращения. Устройство состоит из генератора 1, вырабатывающего постоянные положительные импульсы иА, поступающие на вход сумматора 2. На второй вход сумматора подаются выходные импульсы ждущего мультивибратора 6, сформированные в результате взаимодействия его с индуктивным датчиком 7 частоты вращения коленчатого вала. Датчик вырабатывает отрицательные импульсы ив, число которых определяется частотой вращения коленчатого вала. В самом мультивибраторе 6 формируются положительные импульсы ис, причем число импульсов ив индуктивного датчика 7 определяет ширину выходного положительного импульса ис. Чем больше импульсов ив датчика (чем больше частота вращения коленчатого вала), тем уже выходной импульс мультивибратора. В результате синтеза импульсов иА и ис в сумматоре 2 ликвидируется часть импульсов иА генератора 1 на интервалах между импульсами ис мультивибратора 6 и образуются импульсы uD.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.