Jм - собственный момент инерции механизма, кг∙м∙сек2;
Jд - собственный момент инерции двигателя, кг∙м∙сек2;
Ωм - угловая скорость нагрузки, рад/сек;
Ωд - угловая скорость двигателя, рад/сек;
Мсм - момент на валу нагрузки, кг∙м;
Мд - момент на валу двигателя, кг∙м;
η - КПД зубчатой передачи;
Квм - коэффициент вязкого трения нагрузки, кг∙сек/рад;
Квд - коэффициент вязкого трения двигателя, кг∙сек/рад;
Привидение
статических моментов производится на основе энергетического баланса системы,
т.е. равенства мощностей на валу двигателя и нагрузки с учетом потерь в
редукторе (при условии, что энергия передается от двигателя к нагрузке): ![]() .
.
Следовательно, приведенный к валу двигателя момент нагрузки:
 (2.8)
(2.8)
 , где
, где  .
.
Приведение моментов инерции или маховых моментов к валу двигателя производится на основе того, что величина запаса кинетической энергии движущихся частей привода, отнесенная к одной оси, есть величина постоянная (рис. 2.3)
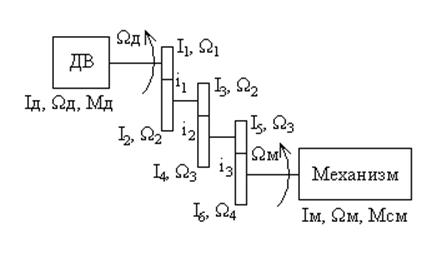
Рис. 2.3

Отсюда разделив
левую и правую части на ![]() , получим выражение для
приведенного к валу двигателя момента инерции:
, получим выражение для
приведенного к валу двигателя момента инерции:
 (2.9)
(2.9)
где  - момент инерции редуктора.
- момент инерции редуктора.
Если отнести момент инерции двигателя к оси нагрузки, то общий момент инерции двигателя и нагрузки относительно оси нагрузки будет
![]() (2.10)
(2.10)
В каталогах на
электродвигатели иногда указываются маховый момент GD2,
где G - вес тела, D=2ρ - приведенный диаметр инерции, причем  .
.
Тогда приведенный маховый момент будет
 (2.11)
(2.11)
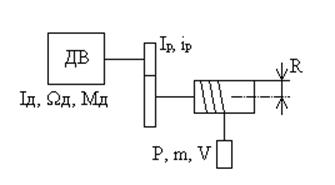
Рис. 2.4
Приведение силы
к оси двигателя (рис. 2.4) производится также на основе уравнения баланса
мощностей ![]() , откуда приведенная к оси двигателя сила P будет выражаться приведенным моментом
, откуда приведенная к оси двигателя сила P будет выражаться приведенным моментом
 (2.12)
(2.12)
где  .
.
Приведение масс
к валу двигателя осуществляется из баланса кинетической энергии (без учета
момента инерции редуктора) и имеет вид (рис. 2.3)  ,
откуда
,
откуда
 (2.13)
(2.13)
Если имеются другие вращающиеся моменты, то
 (2.14)
(2.14)
2.4. Исполнительные устройства с электрическими двигателями
Достоинства и недостатки электроприводов. Следует отметить существующую в настоящее время в роботостроении устойчивую тенденцию создания ПР различного назначения на базе электроприводов, что обусловлено рядом преимуществ электропривода по сравнению с пневматическим и гидравлическим приводами[16]. Электропривод имеет преимущество при разработке высококачественных следящих систем, необходимых для создания универсальных ПР с позиционным и контурным программным управлением, а также для адаптивных и интеллектуальных ПР. Вследствие однотипной элементной базы электромеханические ПР проще стыкуются с другим оборудованием гибких автоматических производств, а для создания подвижных ПР применение электропривода является практически единственным решением.
За последнее десятилетие доля электромеханических ПР возросла в мире с 5 до 20%. В 1985г. доля электромеханических ПР в общем их парке в мире достигла 30%. В России к настоящему времени доля моделей электромеханических ПР составляет около 30%.
Для создания высокофункциональных ПР с программным управлением и особенно для создания адаптивных и интеллектуальных ПР необходимо применение электроприводов, регулируемых по положению. Основным требованием к таким приводам является требование высокого быстродействия и точности обработки заданных положений и траекторий движения при условии изменения в широком диапазоне статической и динамической нагрузки. Поэтому комплектные приводы ПР должны представлять собой автономные следящие системы, автоматически корректирующие свою настройку в зависимости от параметров нагрузки. В состав этих электроприводов должны входить электродвигатель со встроенными электромагнитными тормозами и датчиками внутренней информации (скорости, перемещения, температуры и т.п.), блок управления привода и в общем случае силовая механическая передача. Электродвигатель со встроенными элементами и силовая механическая передача конструктивно входят в состав манипулятора ПР, а блоки управления приводов располагаются либо в единой стойке с устройством управления ПР, либо в отдельной стойке.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.