Балтийский государственный технический университет "ВОЕНМЕХ"
им. Д.Ф. Устинова
ВЫПУСКНАЯ Квалификационная работа
Фомин Святослав Сергеевич______
Фамилия , Имя , Отчество студента
Тема дипломного проекта / дипломной работы
Оптимальное управление БПЛА с использованием прогнозирующей модели
Специальность160403Системы управления летательными аппаратами_____________
ИНДЕКС ПОЛНОЕ НАИМЕНОВАНИЕ СПЕЦИАЛЬНОСТИ
САНКТ-ПЕТЕРБУРГ
2014 г.
Реферат
Пояснительная записка 71 с., 4 ч., 4 рис., 9 табл., 27 источников, 3 прил.
БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ, МАТЕМАТИЧЕСКАЯ МОДЕЛЬ, ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ, ФУНКЦИОНАЛ КРАСОВСКОГО , ПОСАДКА, РАЗВОРОТ, МОДЕЛИРОВАНИЕ
Объектом исследования является движение беспилотного летательного аппарата.
Цель работы - разработка программного обеспечения для управления БПЛА, позволяющего выполнить маневры бокового разворота и посадки с заданными критериями оптимальности.
В результате выполнения работы сформулированы требования к программному обеспечению управления БПЛА, разработано и отлажено программное обеспечение обеспечивающее управление БПЛА в продольной и боковой плоскости, определена стоимость разработки.
Данное программное обеспечение может быть внедрено в автопилот БПЛА для расчета траектории совершаемых маневров в режиме реального времени.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ..............................................................................................................5
1КОНСТРУКТОРСКИЙ РАЗДЕЛ.........................................................................6
1.1Разработка математической модели динамики БПЛА как твердого тела..................................................................................................................6
1.1.1 Получение аэродинамических характеристик прототипа....6
1.1.2 Анализ системы уравнений пространственного движения ЛА ...............................................................................................10
1.1.3. Линеаризация общей пространственной системы...............16
1.1.4 Уравнения продольного движения в вариациях...................18
1.1.5 Уравнения бокового движения в вариациях..........................20
1.2 Разработка алгоритма с коррекцией структуры управления
1.2.1 Оптимизация процесса на основе различных критериев оптимальности...................................................................................22
1.2.2 Оптимизация по критерию Красовского................................29
1.2.3 Оптимизация системы уравнений продольного движения.30
1.2.4 Оптимизация системы уравнений бокового движения........32
1.3 Проведение расчетов на ЭВМ, выдача рекомендаций.....................34
1.3.1 Моделирование разворота в боковой плоскости..................34
1.3.2 Моделирование процесса посадки в вертикальной плоскости...........................................................................................36
1.3.3 Вывод........................................................................................35
2ТЕХНОЛОГИЧЕСКИЙ РАЗДЕЛ......................................................................36
2.1 Выбор и анализ среды программной реализации..............................48
2.2 Программная реализация алгоритма оптимального управления...49
2.3 Описание программного обеспечения................................................49
3ТЕХНИКО-ЭКОНОМИЧЕСКИЙ РАЗДЕЛ......................................................50
3.1. Краткая характеристика работы и её назначение .............................50
3.2. Определение трудоемкости выполнения проекта ............................50
3.3. Расчет себестоимости программного обеспечения.........................51
3.3.1. Материалы ...............................................................................52
3.3.2 Основная и дополнительная заработная плата .....................53
непосредственных исполнителей....................................................53
3.3.3. Отчисления па социальные нужды........................................53
3.3.4. Амортизационные отчисления...............................................54
3.3.5 Накладные расходы..................................................................54
3.4.Выводы ...................................................................................................55
4БЕЗОПАСНОСТЬ ЖИЗНЕДЕЯТЕЛЬНОСТИ И ЭКОЛОГИЯ.......................57
4.1 Обеспечение безопасности на рабочем месте пользователя............57
4.2 Расчет защиты отключаемого устройства..........................................60
4.3 Пожарная безопасность........................................................................62
4.4 Экологическая безопасность................................................................63
ЗАКЛЮЧЕНИЕ.....................................................................................................66
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ............................................67
Приложение А........................................................................................................71
Приложение Б........................................................................................................73
Приложение В........................................................................................................75
ВВЕДЕНИЕ
Построение оптимального управления с использованием методов вариационного исчисления, принципа максимума Л.С. Понтрягина [1], динамического программирования Беллмана [2] , численных методов математического программирования, связано с решением двухточечной краевой задачи, и для нелинейных систем требует высоких вычислительных затрат, препятствующих реализации этих методов в процессе полета [3]. Это является существенным недостатком синтеза управления. В результате получается программное управление, не способное эффективно решать задачу приведения беспилотного летательного аппарата в заданное состояние без корректировки самого алгоритма управления при изменении параметров исходной системы и условий ее функционирования. Для автоматического управления беспилотного летательного аппарата предпочтительны алгоритмы с малым объемом вычислений, способные формировать управление на борту в изменяющихся условиях полета. К таким методам в теории оптимального управления относятся методы теории дифференциальных игр в классах игровых задач [4] и оптимизация по функционалу Красовского[5]. Здесь задание требований на конечное состояние выполняется путем подбора соответствующей части критерия качества и приводит к компромиссному результату. В этом методе вместо двухточечной краевой задачи решаются уже задачи Коши [6].
В данной работе приводится решение задачи управления БПЛА на этапах разворота и посадки на основе прогнозирующей модели, с использованием оптимизации по функционалу Красовского.
Актуальность работы выражена в том, что дистанционное управление разведывательными БПЛА , осуществляемое в настоящее время, может быть заменено, частично или полностью, подобными алгоритмами управления, реализуемыми непосредственно на борту БПЛА. Это позволит снизить нагрузку на операторов БПЛА, фактически исключая их из процесса пилотирования БПЛА, позволив им сконцентрироваться на управлении разведывательным оборудованием и системами вооружения, а также повысит безопасность полета.
1КОНСТРУКТОРСКИЙ РАЗДЕЛ
1. 1Разработка математической модели динамики БПЛА как твердого тела
1.1.1 Получение аэродинамических характеристик прототипа
Аэродинамический расчет является важнейшим элементом аэродинамического исследования ЛА, или его отдельных частей (корпуса, крыльев, оперения, управляющих устройств). Результаты такого расчета используются при траекторных вычислениях, исследовании устойчивости полета и управляемости, при решении задач, связанных с прочностью движущихся объектов, при определении летно- технических характеристик ЛА.
При рассмотрении аэродинамических характеристик можно использовать принцип расчленения характеристик на отдельные компоненты для изолированных корпусов и несущих поверхностей (крылья и оперение), а также их комбинаций [7]. В последнем случае аэродинамические силы и моменты определяются в виде суммы соответствующих характеристик (для изолированных корпуса, крыльев и оперения ) и интерференционных поправок, обусловленных эффектами взаимодействия . Аэродинамические силы и моменты можно определить с использованием аэродинамических коэффициентов. По представлению полной аэродинамической силы и полного аэродинамического момента в проекциях на оси соответственно скоростной и связанной систем координат приняты следующие названия аэродинамических коэффициентов: Сх, Су, Сz - аэродинамические коэффициенты лобового сопротивления, подъемной и боковой силы. mx, my,mz - аэродинамические коэффициенты моментов крена, рыскания и тангажа.
В качестве прототипа примем ударный БПЛА MQ9-A/B " Reaper/Altair", успешно применяемый ВВС США в операциях по поиску и уничтожению лиц, представляющих угрозу национальной безопасности США. Данный БПЛА был выбран в качестве прототипа , так как является единственным представителем ударных БПЛА, выпускающимся серийно [8-11].
В августе 2008 года ВВС США завершили перевооружение беспилотными летательными аппаратами MQ9-A/B " Reaper/Altair"первой боевой авиачасти — 174-го истребительного авиакрыла Национальной гвардии [12]. Перевооружение происходило в течение трёх лет . Ударные БПЛА показали высокую эффективность в Афганистане и Ираке [12]. Основные преимущества перед заменёнными F-16: меньшая стоимость закупки и эксплуатации, большая продолжительность полёта, безопасность операторов [13] и возможность их посменной работы при продолжительных полетах [12].
Внешний вид БПЛА представлен на рисунке 1. На рисунке 2 представлены габаритные размеры БПЛА [14].

Рисунок 1.
Следует отметить , что данный БПЛА получил новое , Y-
образное оперение , в то время как его предыдущая модификация имела V
- образное оперение . 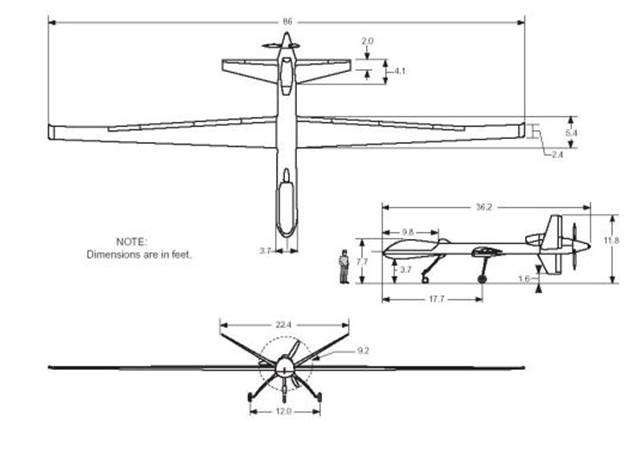
Рисунок
2
Основные параметры БПЛА представлены в таблице 1.
Таблица 1- Основные параметры БПЛА
|
Величина |
Обозначение |
Значение |
|
Длина ,м |
|
11 |
|
Диаметр корпуса |
|
1.12 |
|
Длина носовой части |
|
1.25 |
|
Длина цилиндрической части |
|
9.75 |
|
Удлинение носовой части |
|
1.116 |
|
Удлинение цилиндрической части |
|
8.705 |
|
Полный размах несущей поверхности |
|
26 |
|
Размах несущей поверхности без учета диаметра корпуса |
|
24.898 |
|
Длина бортовой хорды консоли |
|
1.64 |
|
Длина концевой хорды консоли |
|
0.74 |
|
Площадь консоли передней несущей поверхности |
|
29.63 |
|
Площадь консоли задней несущей поверхности |
|
7.4 |
|
Удлинение передних консолей |
|
20.92 |
|
Удлинение задних консолей |
|
5.2 |
|
Сужение передних консолей |
|
2.216 |
|
Сужение задних консолей |
|
1.92 |
|
Угол стреловидности консолей, измеряемый по линии середины хорд |
|
2.5 |
|
Угол стреловидности консолей , измеряемый по передней кромке |
|
7 |
|
Угол стреловидности консолей , измеряемый по задней кромке |
|
4 |
|
Относительная толщина профиля |
|
0.1 |
|
Длина САХ крыльев |
|
1.247 |
|
Координата Z средней аэродинамической хорды крыльев |
|
5.44 |
|
Координата X средней аэродинамической хорды относительно начала корневой хорды |
|
5.45 |
|
Расстояние от передней точки корпуса до передней консоли |
|
3.35 |
|
Расстояние от передней точки корпуса до задней консоли |
|
5.8 |
|
Крейсерская скорость |
|
325 |
|
Максимальная скорость |
|
440 |
|
Масса максимальная взлетная |
|
4763 |
|
Максимальные углы отклонения рулей |
|
45 |
Аэродинамические параметры ЛА
Таблица 2 - Аэродинамические параметры БПЛА
|
Коэффициент лобового сопротивления |
|
|
Производная коэффициента лобового сопротивления по углу отклонения руля крена |
|
|
Производная коэффициента лобового сопротивления по углу отклонения руля тангажа |
|
|
Производная коэффициента лобового сопротивления по углу отклонения |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




