





Лабораторная работа № 2
Решение дифференциальных уравнений в пакете Simulink
Цель работы
1. Определение непрерывных моделей систем автоматического управления по заданным дифференциальным уравнениям или заданным передаточным функциям.
2. Определение матриц коэффициентов состояния, управления, наблюдения и выхода системы по дифференциальным уравнениям систем автоматического управления.
Теоретическое обоснование:
Классической формой представления однопараметрической математической модели системы является дифференциальное или операторное уравнение
 , (3.1)
, (3.1)
(ansn + an-1sn-1 +…+ a1)×Y(s) = (bmsm + bm-1sm-1 +…+b1)×U(s), (3.2)
где u, у - входной и выходной сигналы системы управления, an, bm – коэффициенты дифференциального или операторного уравнения.
Из выражения (3.2) определяется передаточная функция
 (3.3)
(3.3)
Одной передаточной функции системы управления (3.3) могут соответствовать несколько структурных схем, которые могут быть получены способами прямого, параллельного и последовательного программирования.
Непрерывная линейная система также может быть описана дифференциальным векторно-матричным уравнением
 (3.4)
(3.4)
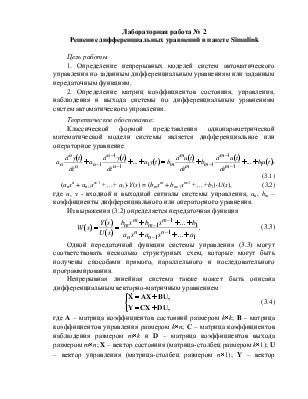
где А – матрица коэффициентов состояний размером k´k; В – матрица коэффициентов управления размером k´n; С – матрица коэффициентов наблюдения размером m´k и D – матрица коэффициентов выхода размером m´n; X – вектор состояния (матрица-столбец размером k´1); U – вектор управления (матрица-столбец размером n´1); Y – вектор наблюдения (матрица-столбец размером m´1)[1]. Структурная схема вычисления значений векторно-матричных уравнений (3.4) изображена на рис. 3.1.
Описание работы
В пакете Simulink для передаточной функции (3.5) модели решения дифференциальных уравнений могут быть построены различными методами.
Рис. 3.1 Структурная схема вычисления значений векторно-матричных уравнений
 (3.5)
(3.5)
Метод прямого программирования
Изображение выходного сигнала можно определить через изображение дополнительной переменной e (3.6, 3.7).
Y(s) = (s2 + 4s + 3)×E(s), (3.6)
откуда
 (3.7)
(3.7)
Уравнение (3.7) можно представить в виде дифференциального уравнения:
 (3.8)
(3.8)
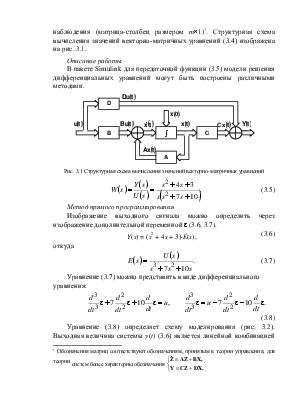
Уравнение (3.8) определяет схему моделирования (рис. 3.2).
Выходная величина системы y(t) (3.6) является линейной комбинацией фазовых координат
xi. Фазовую координату
интегратора 2 обозначают как x1, то есть e = x1, интегратора 1 – x2, то есть  , и так далее. Тогда фазовые координаты схемы
моделирования рис. 3.2 связаны следующими соотношениями:
, и так далее. Тогда фазовые координаты схемы
моделирования рис. 3.2 связаны следующими соотношениями:
 (3.9)
(3.9)
Рис.3.2 Схема моделирования системы методом прямого программирования
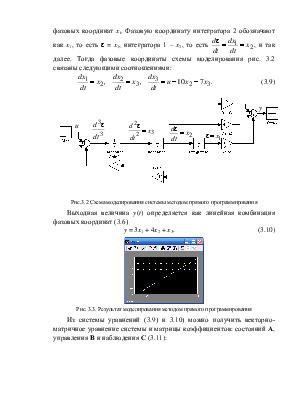
Выходная величина y(t) определяется как линейная комбинация фазовых координат (3.6)
y = 3x1 + 4x2 + x3. (3.10)
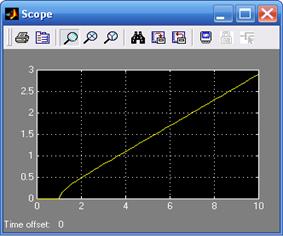
Рис. 3.3. Результат моделирования методом прямого программирования
Из системы уравнений (3.9) и 3.10) можно получить векторно-матричное уравнение системы и матрицы коэффициентов: состояний А, управления В и наблюдения С (3.11):
 (3.11)
(3.11)
 C = [3 4 1], D = 0;
C = [3 4 1], D = 0;
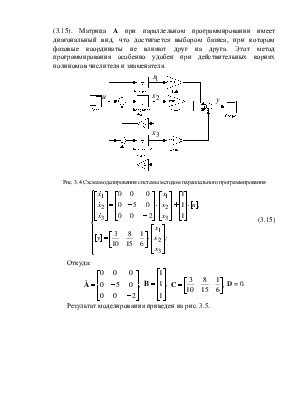
Метод параллельного программирования
Структурная схема для параллельного программирования получается из передаточной функции (3.6), если ее представить в виде суммы элементарных дробей. Коэффициенты С0, С1, С2, вычисленные методом Хевисайда, и корни знаменателя определяют с помощью программы:
coef=[1,7,10,0]; %Коэффициенты многочлена
r=roots(coef) %Корни многочлена
syms s %Символьнаяпеременная
C0=limit([(s^2+4*s+3)*s/(s^3+7*s^2+10*s)],0) %Пределвточке s=0
Cl=limit([(s^2+4*s+3)*(s+5)/(s^3+7*s^2+10*s)],-5) %Пределвточке s=-5
C2=limit([(s^2+4*s+3)*(s+2)/(s^3+7*s^2+10*s)],-2) %Пределвточке s=-2
Откуда
 (3.12)
(3.12)
 (3.13)
(3.13)
 . (3.14)
. (3.14)
С учетом выражений (3.13, 3.14) получена схема моделирования методом параллельного программирования (рис. 3.4).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.