![]() 2 МАТЕМАТИЧНИЙ ОПИС ПЕРЕХІДНИХ ПРОЦЕСІВ
В ЕЕС
2 МАТЕМАТИЧНИЙ ОПИС ПЕРЕХІДНИХ ПРОЦЕСІВ
В ЕЕС
2.1 Рівняння турбіни й регулятора швидкості турбіни
Основне
призначення моделей турбін у розрахунках складається у відображенні впливу
систем регулювання частоти на потужність турбіни ![]() при
значних змінах частоти обертання. Моделі парових турбін звичайно засновані на
допущенні про незмінність тиску пари перед регулювальними клапанами.
Регулювання режиму котла, таким чином, не враховуються. Цим визначається образ
застосування моделі регулювання парової турбіни: вона придатна для розрахунків
тих перехідних режимів, у яких з моменту зміни частоти проходить не більше 5 –
10 с. Якщо ж режим роботи генератора з істотно, що змінилася
потужністю, триває більший час (наприклад, у випадку тривалого дефіциту
потужності в енергосистемі), то істотно вплив головного регулятора
котлоагрегату. Без такого регулювання паропродуктивність котла не змінилася б
й, отже, потрібний режим міг би бути забезпечений тільки короткочасно, за рахунок
інерционності котла.
при
значних змінах частоти обертання. Моделі парових турбін звичайно засновані на
допущенні про незмінність тиску пари перед регулювальними клапанами.
Регулювання режиму котла, таким чином, не враховуються. Цим визначається образ
застосування моделі регулювання парової турбіни: вона придатна для розрахунків
тих перехідних режимів, у яких з моменту зміни частоти проходить не більше 5 –
10 с. Якщо ж режим роботи генератора з істотно, що змінилася
потужністю, триває більший час (наприклад, у випадку тривалого дефіциту
потужності в енергосистемі), то істотно вплив головного регулятора
котлоагрегату. Без такого регулювання паропродуктивність котла не змінилася б
й, отже, потрібний режим міг би бути забезпечений тільки короткочасно, за рахунок
інерционності котла.
При роботі регулятора тиску пари «до себе», що підтримує незмінним тиск пари за котла, знижується вплив процесів в енергосистемі на режим роботи блоку. У випадку виникнення, наприклад, дефіциту потужності в енергосистемі й зниження частоти дія регулятора швидкості викликає збільшення відкриття регулювальних клапанів і ріст потужності турбіни. Але при цьому через збільшення витрати пари його тиск на вході в турбіну знижується й регулятор «до себе», відновлюючи задану величину тиску, зменшує відкриття регулювальних клапанів, після чого потужність знижується до вихідної величини. Набір генератором додаткового навантаження при виникненні в енергосистемі дефіциту потужності виявляється при такому регулюванні короткочасним.
Таким чином, регулятор тиску пари «до себе», діючи зустрічно стосовно регулятора швидкості, перешкоджає участі блоку в підтримці балансу потужності в енергосистемі. Підтримки тиску пари при дії регулятора швидкості повинне забезпечуватися шляхом впливу на зміну паропродуктивності котла. Це регулювання дуже повільне й може не враховуватися при розрахунках динамічної стійкості.
Найпростіша
модель регулювання парової турбіни із проміжним пароперегрівником (рис. 2.1)
при сталості тиску пари після основного пароперегрівника складена в такий
спосіб. Регулятор швидкості конденсаційного агрегату змінює відкриття
регулювального клапана пропорційно ковзанню ротора s, відповідно
величині ![]() , де
, де
![]() -ковзання,
-ковзання, ![]() -нерівномірність
регулювання, тобто величина зворотна статизму регулювання
-нерівномірність
регулювання, тобто величина зворотна статизму регулювання ![]() =4,5
=4,5![]() 0,5,
0,5, ![]() =22
=22![]() 2.
2.
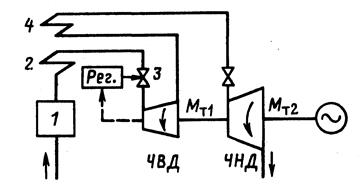
1-казан, 2-основний пароперегрівник, 3-регулюючий клапан,
4-проміжний пароперегрівник
Рисунок 2.1 - Принципова схема парової турбіни
Механізми
регулятора швидкості характеризуються нелінійністю типу «люфт», що звичайно
представляють спрощено зоною нечутливості до малих відхилень частоти обертання.
При цьому сигнал регулювання ![]() на початку перехідного
процесу відмінний від нуля тільки тоді, коли ковзання
на початку перехідного
процесу відмінний від нуля тільки тоді, коли ковзання ![]() стає
більше деякої величини
стає
більше деякої величини ![]() приблизно рівній половині ширини
зони нечутливості:
приблизно рівній половині ширини
зони нечутливості:
 (2.1)
(2.1)
звичайно встановлюється ![]()
![]() 0,15 Гц.
0,15 Гц.
Зміни відкриття
регулювального клапана ![]() описується диференціальним
рівнянням:
описується диференціальним
рівнянням:
 (2.2)
(2.2)
де Трс – постійна часу регулятора швидкості.
Відкриття регулювального клапана![]() обмежено мінімальним і максимальним
значеннями:
обмежено мінімальним і максимальним
значеннями:
![]() (2.3)
(2.3)
Переміщення регулювального клапана не миттєво викликає зміна парової потужності турбіни (необхідно врахувати инерционность, парових обсягів турбіни).
Урахуємо парові обсяги диференціальним рівнянням першого порядку:
 (2.4)
(2.4)
де ![]() - постійна часу парових
обсягів турбіни,
- постійна часу парових
обсягів турбіни,
![]() -потужність турбіни.
-потужність турбіни.
2.2 Рівняння руху ротора генератора
Це рівняння зв'язує рух ротора генератора з моментом інерції й результуючим моментом, що діє на ротор й обумовлений механічним й електричним моментами:
 (2.5)
(2.5)
де ![]() - постійна часу інерції
генератора,
- постійна часу інерції
генератора,
![]() - кут між вектором ЕРС
холостого ходу генератора й вектором напруги прийомної системи.
- кут між вектором ЕРС
холостого ходу генератора й вектором напруги прийомної системи.
У відносних одиницях при малих відхиленнях кутової швидкості генератора
від номінальної можна вважати, механічний й електричний моменти рівні механічної
потужності турбіни ![]() й електричної потужності
генератора
й електричної потужності
генератора ![]() .
.
Тому що  , те рівняння руху ротора генератора буде
мати вигляд:
, те рівняння руху ротора генератора буде
мати вигляд:
 (2.6)
(2.6)
де ![]() - відхилення кутової швидкості генератора
від номінальної.
- відхилення кутової швидкості генератора
від номінальної.
У рівнянні
(2.6) час і постійна інерції мають розмірність с, ![]() - 1/с,
потужності у відносних одиницях.
- 1/с,
потужності у відносних одиницях.
Потужність
турбіни розраховуємо по формулі (2.4), а потужність електричну приймаємо рівної
потужності навантаження ![]() , тобто не враховуємо
втрати активної потужності в генераторі й в електропередачі.
, тобто не враховуємо
втрати активної потужності в генераторі й в електропередачі.
2.3 Рівняння регулятора частоти
Регулятори частоти призначені для відновлення частоти після закінчення перехідного процесу, викликаного порушенням балансу потужності й дії первинного регулювання частоти. Забезпечення необхідної генеруючої потужності при заданій частоті здійснюється шляхом зсуву регулювальної характеристики автоматичного регулятора частоти обертання (АРЧО), впливаючи на вузол початкової установки частоти АРЧО.
У даній роботі регулятор частоти (вимірювальний орган і підсилювач), що
діє на механізм керування турбіною (МКТ), приймаємо безінерціоним. Електродвигун
МКТ, представляємо однією інерційною ланкою з постійної часу ![]() . Коефіцієнт підсилення автоматичного
регулятора частоти (АРЧ) КАРЧ (1/с) являє собою добуток
коефіцієнтів передачі вимірювального органа, підсилювача, електродвигуна й
властиво МКТ. У відносних одиницях він виражає швидкість відносного зсуву
золотника регулятора турбіни при незмінній, рівному одиниці, відхиленні частоти
на вході АРЧ. Вхідною величиною АРЧ є відхилення частоти
. Коефіцієнт підсилення автоматичного
регулятора частоти (АРЧ) КАРЧ (1/с) являє собою добуток
коефіцієнтів передачі вимірювального органа, підсилювача, електродвигуна й
властиво МКТ. У відносних одиницях він виражає швидкість відносного зсуву
золотника регулятора турбіни при незмінній, рівному одиниці, відхиленні частоти
на вході АРЧ. Вхідною величиною АРЧ є відхилення частоти ![]() , а виходом – сигнал регулювання
, а виходом – сигнал регулювання ![]() .
.
Таким чином, передатна функція АРЧ має вигляд:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.