Аннотация
Курсовой проект 51 с., 10 таблиц, 10 рисунков.
Расчётно-теоретический раздел. Предложен метод устранения неоднозначности измерения дальности для первичных радиолокационных станций управления воздушным движением с использованием различных пар периодов повторения зондирующих импульсов на четных и нечетных сканах. Проведено теоретическое обоснование метода. Приведена методика построения гипотез значений однозначных дальностей до воздушных целей и последующего выбора наиболее вероятных гипотез. Проведен сравнительный анализ эффективности методов определения однозначной дальности. Приведены результаты синтеза программно-аппаратного устройства для определения однозначной дальности.
Конструкторско-технологический раздел. Содержит описание и результаты разработки конструкции печатного узла и технологического процесса сборки разработанного устройства.
Технико-экономический раздел. Содержит расчёты себестоимости проектируемого изделия, приведены результаты сравнительного анализа технико-экономических показателей вновь проектируемого и базового варианта.
Ключевые слова: однозначная дальность, радиолокационная станция, РЛС, АЦП, радиолокационный сигнал, аппаратура обработки, когерентная обработка, «распутывание» дальностей, период повторения, зондирующие импульсы, вектор однозначных дальностей, четные и нечетные сканы.
Соответствие между полученными техническими параметрами и требованиями технического задания
Соответствие технических параметров разработанного устройства с требованиями технического задания отражено в таблице 1
Таблица 1 – Соответствие технических параметров
|
Технические характеристики |
Значение |
|
|
Требуется |
Получено |
|
|
Отношение сигнал/шум |
не менее 10 дБ |
не менее 10 дБ |
|
Среднее время наработки на отказ |
20 000 ч |
153 148 ч |
|
Рабочий диапазон температур |
от -10°С до +40°С |
от -30°С до +65°С |
Содержание
Список условных сокращений. 5
Введение. 6
1 Расчётно-теоретический раздел. 7
1.1 Когерентно-импульсный метод. 7
1.2 Исследованиеметодовопределенияоднозначнойдальности. 9
1.3 Исследование метода устранения неоднозначности измерения дальности с использованием различных пар периодов зондирования на четных и нечетных сканах. 11
1.4 Оценкаэффективностиметода. 21
1.5 Разработка структуры программно-аппаратного устройства. 24
1.6 Разработка принципиальной схемы устройства и выбор элементной базы. 25
2 Конструкторско-технологический раздел. 27
2.1 Разработка технического задания. 27
2.2 Разработка конструкции печатного узла. 28
2.3 Разработка технологического процесса сборки печатного узла. 35
2.3.1 Общие сведения о технологии поверхностного монтажа. 32
2.3.2 Разработка технологического процесса. 36
2.4 Расчёт надежности. 39
2.5 Основные выводы по разделу 2. 41
3 Технико-экономический раздел. 43
3.1 Расчёт себестоимости. 43
3.2 Сравнительный анализ технико-экономических показателей вновь проектируемого и базового изделий. 50
3.3 Основные выводы по разделу 3. 50
Заключение. 51
Список используемой литературы.. 52
Приложение 1. 53
АП – антенный переключатель
АПОИ – аппаратура первичной обработки информации
АЦП – аналого-цифровой преобразователь
БП - биполярный
ГНЧ – генератор несущей частоты
ГОИ – генератор опорного импульса
ГСИ – генератор синхроимпульсов
ДО – доплеровская обработка
ИМС – интегральная микросхема
ИН – инвертор
КДП – командный диспетчерский пункт
МОП - металл окисел полупроводник
ОСШ – отношение сигнал/шум
ПЛИС – программируемая логическая интегральная схема
ПП – печатная плата
РЛС – радиолокационная станция
СФ – согласованный фильтр
СФОИ – согласованный фильтр одиночного импульса
УВД – управление воздушным движением
ФД – фазовый детектор
ЦОС – цифровая обработка сигналов
ЧМ – частотная модуляция
Введение
Современные системы управления воздушным движением характеризуются использованием различных радиотехнических средств, среди которых особое положение занимают радиолокационные станции (РЛС), поскольку они являются основными источниками информации о воздушной обстановке для диспетчеров службы движения гражданских аэропортов, руководителей взлетом/посадкой самолетов на аэродромах. Основной задачей РЛС является формирование обобщенной воздушной обстановки в зоне действия системы управления и её прогнозирование на определенный период времени.
В современных РЛС все более широкое применение находят цифровые устройства формирования и обработки сигналов. Цифровые устройства, по сравнению с аналоговой аппаратурой, отличаются, как правило, меньшей стоимостью, значительным уменьшением трудоемкости при настройке, более высокой надежностью и стабильностью параметров.
В системах управления воздушным движением широко применяются посадочные и обзорные первичные радиолокационные станции (РЛС) использующие когерентно-импульсный метод селекции движущихся целей.
Такой режим работы, по сравнению с некогерентным режимом, имеет ряд преимуществ, позволяющих повысить энергетический потенциал первичных РЛС.
Цель курсовой работы заключается в создании программно-аппаратного устройства измерения дальности до воздушных объектов для посадочного радиолокатора при повышенной частоте повторения зондирующих импульсов, приводящей к неоднозначной оценке дальностей до обнаруженных целей, путем разработки алгоритма «распутывания» дальностей для устранения неоднозначности измерения дальности с использованием различных пар периодов зондирования на четных и нечетных сканах работы посадочного радиолокатора.
1.Расчетно-теоретический раздел
1.1 Когерентно-импульсный метод обработки радиолокационных сигналов
Сущность когерентно-импульсного метода обработки радиолокационных сигналов заключается в сравнении фаз отраженных импульсных сигналов, принимаемых РЛС, с фазой специальных опорных когерентных колебаний, жестко связанных с моментом излучения импульсов передатчика радиолокационной станции.
Преимущества данного метода относительно некогерентного способа заключаются в следующих особенностях:
· большая дальность обнаружения целей за счет когерентного накопления энергии эхо-сигналов;
· повышение точности измерения радиальной скорости целей при использовании доплеровского способа ее измерения по сравнению с дифференцированием дальности;
· увеличение разрешающей способности при наблюдении групповых целей за счет различий в радиальной скорости при их нахождении в одном и том же импульсном объеме РЛС;
· повышение помехоустойчивости РЛС от коррелированных помех, например, от местных предметов или облаков дипольных отражателей, за счет наличия системы СДЦ.
Сравнение фаз сигналов осуществляется при помощи фазового детектора приемного устройства радиолокационной станции. На вход фазового детектора подаются два сигнала: когерентные опорные колебания и отраженный сигнал, принимаемый РЛС [1].
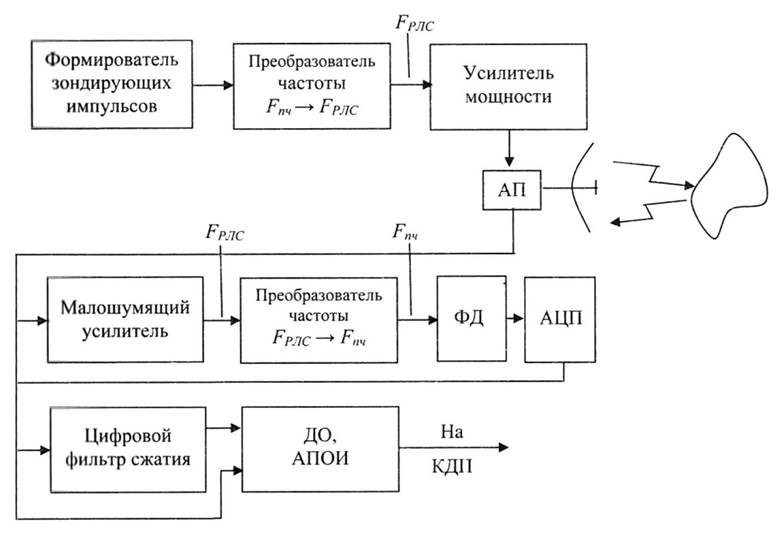
Рисунок 1.1 – Структурная схема РЛС
Структурная схема РЛС, использующей когерентно-импульсный
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




